
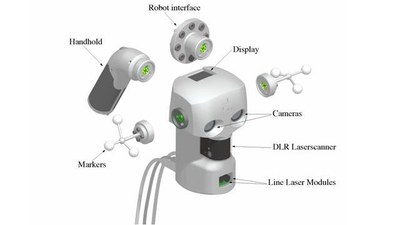
3D-Modellierer (2006–2017)

Technische Daten
Größe: | 17 cm × 20 cm × 11 cm |
Gewicht: | 850 g |
Sensorik: |
|
Kommunikation: | Ethernet über FireWire |
Arbeitsraum: |
|
Besonderheiten: |
|



{kind=link}
{kind=link}

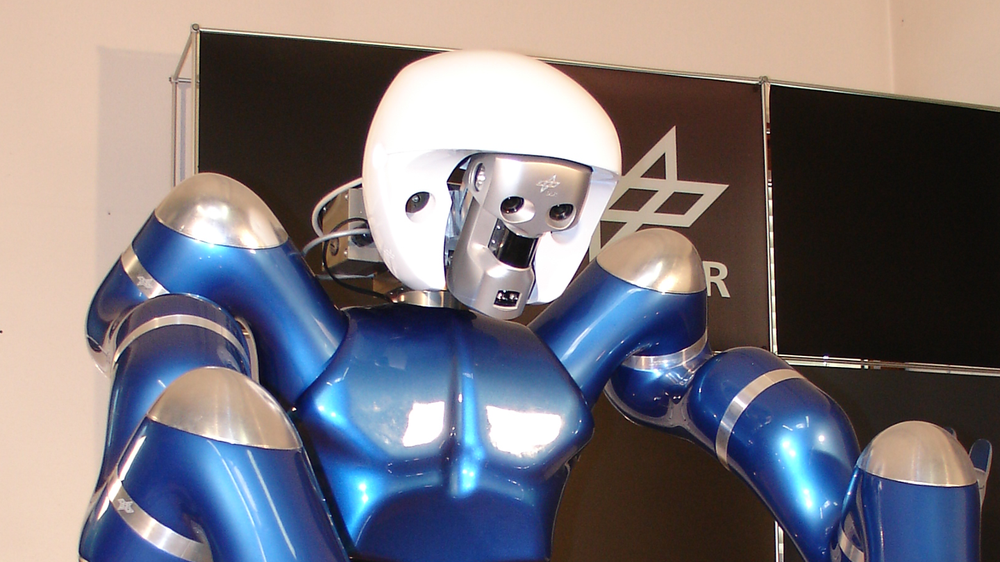
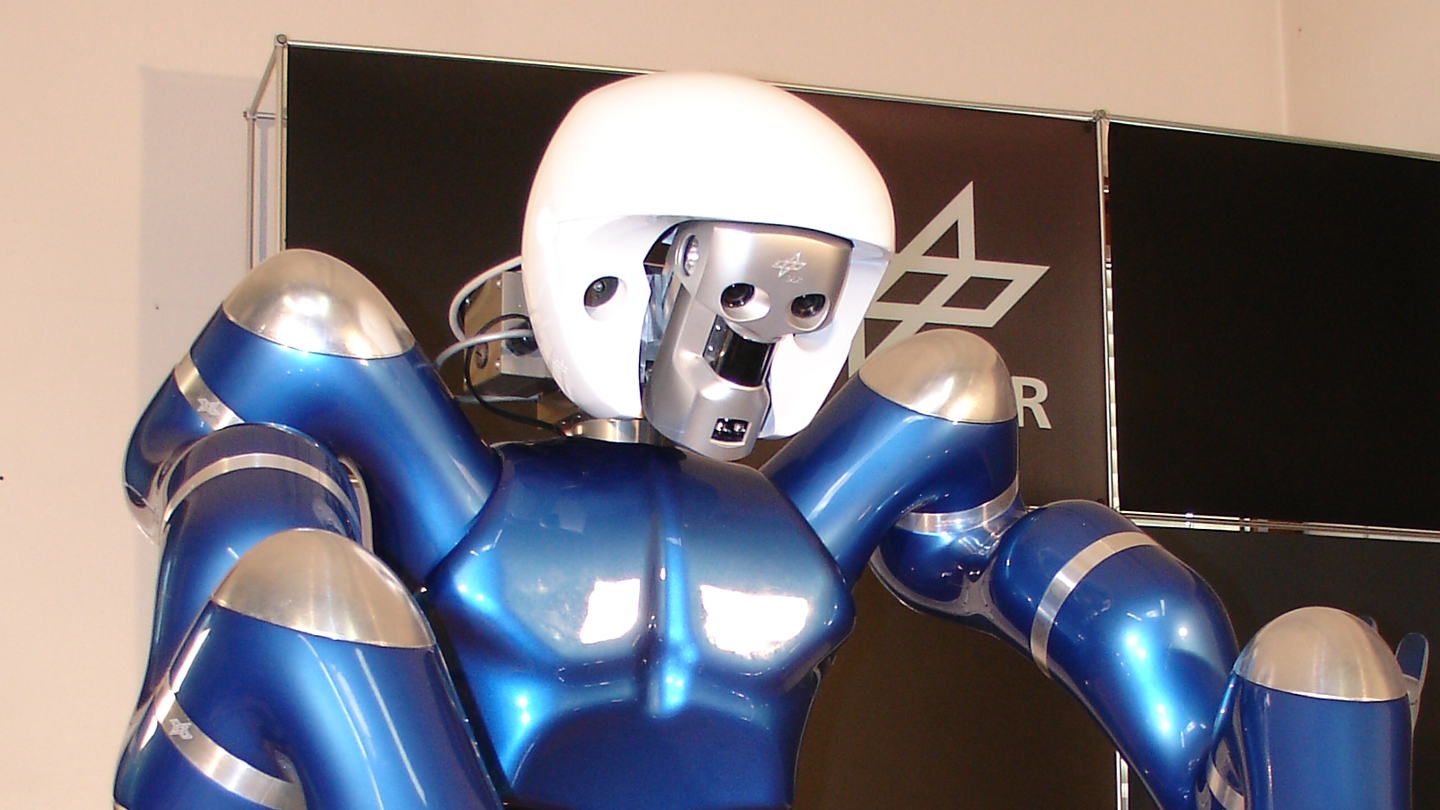
Verwendung des 3D-Modellierers als Teil des Kopfes eines humanoiden Roboters
Der Modellierer kann als Teil des Kopfes eines humanoiden Roboters wie Rollin' Justin eingesetzt werden, um ihm die Möglichkeit zu geben, seine Umgebung visuell wahrzunehmen.
{kind=link}