
Schritthaltende Oberflächenrekonstruktion
Aufgabenstellung
Die Entwicklung von Entfernungssensoren ermöglicht die Erzeugung von 3D-Modellen durch berührungslose Messung der jeweiligen Objektoberfläche. Diese Modelle können für Virtual-Reality-Anwendungen wie virtuelle Museen oder Produktpräsentationen eingesetzt werden, im Bereich der Robotik aber auch für die Bahnplanung und Kollisionsvermeidung.
Die Erfassung der Modelle kann manuell oder automatisch erfolgen. Bei der manuellen Erfassung führt der Benutzer den Sensor per Hand um das Objekt herum (3D-Modeller).
Ein externes Tracking-System wird eingesetzt, um die 6DoF-Position des Sensors zu erfassen und die lokalen Entfernungsdaten in einen globalen Frame umzuwandeln. Bei der automatischen Erfassung ist der Entfernungsmesser auf einem aktiven Manipulator, wie z. B. einem Roboter, montiert.
Die erzeugten 3D-Daten sind ungefiltert und unstrukturiert, d.h. bei schlechten Messbedingungen können die Daten ungenaue Abtastpunkte und Ausreißer enthalten, außerdem befinden sich die Punkte im Verhältnis zur abgetasteten Oberfläche in keiner bestimmten Ordnung. Darüber hinaus handelt es sich bei den Daten um eine Punktewolke ohne Informationen über die Vernetzung zwischen den verfügbaren Punkten.
Daher wird die Online-Datenverarbeitung und Modellerzeugung diese Systeme maßgeblich unterstützen. Bei der handgeführten Scanner-Anwendung können die Modelle sofort angezeigt werden und dem Benutzer so visuelle Rückmeldungen liefern. Bei der automatischen Anwendung werden die Modelle zur Kollisionsvermeidung und zur Anpassung der Roboterbewegungsbahnen (Next-Best-View) eingesetzt. Autonome Exploration des Konfigurationsraums (C-Space) und Objektinspektion
Methoden
Ziel dieses Rekonstruktionsansatzes ist die sukzessive Erzeugung eines einzigen Dreiecksnetzes (das sich der unbekannten, gemessenen Oberfläche annähert) durch inkrementelles Einsetzen der Sensordaten. Um die Daten generischer Sensortypen verarbeiten zu können, wird dabei Punkt für Punkt vorgegangen. Dieser Online-Ansatz kann als vierstufige vorwärtsgerichtete Prozesskette beschrieben werden.
Im Folgenden werden die vier Stufen erläutert.


1. Eingangsdatenreduzierung
Mehrere überlappende Abtastungen mit dem Scanner können eine lokale Punktdichte erzeugen, welche die Genauigkeit des Sensors übersteigt. Daraus ergeben sich Redundanzen in den Daten, was den Rechenaufwand erhöht, ohne das Ergebnis zu verbessern. Aus diesem Grund muss die Dichte der gemessenen Punktwolke begrenzt werden. Dies geschieht durch eine erste Reduzierung der Punkte am Eingang.
2. Schätzung der Flächennormalen
Bleibt ein neuer Punkt auch nach dem Reduktionsschritt erhalten, wird die entsprechende Flächennormale an diesem Punkt geschätzt. Hier wird mithilfe der Methode der kleinsten Quadrate die (Tangential-)Ebene mit dem kleinsten Abstand zu den benachbarten Punkten des neuen Punktes berechnet, wobei die Kovarianzmatrix dieser Nachbarschaft verwendet wird (benachbarte Punkte sind alle Punkte, die unter einer bestimmten Entfernung zu diesem Punkt liegen). Da alle Punkte in der Nachbarschaft des neuen Punkts die benachbarten Punkte beeinflussen, und umgekehrt, müssen auch deren Normale aktualisiert werden.
3. Selektion der Eckpunkte
Da die Punkte willkürlich und schrittweise eingefügt werden, ist ein Schritt notwendig, in dem die Eckpunkte „selektiert“ bzw. ausgewählt werden. Die benachbarten Bereiche bei der Berechnung der Normalen beinhalten zunächst nur wenige Punkte, was zu mangelhaften Berechnungsergebnissen führt. Aus diesem Grund sollten neue Punkte erst dann in das Modell (Dreiecksnetz) eingefügt werden, wenn die zugehörige Normale hinreichend genau berechnet werden konnte. Hierdurch werden auch Spitzen oder Ausreißer herausgefiltert, weil diese stets eine kleine oder gar keine Nachbarschaft besitzen.
Die mittlere Richtungsänderung der berechneten Normale wird als Kriterium für einen „guten“ Punkt herangezogen. Nur Punkte mit geringer Änderung werden für das Modell berücksichtigt und zum nächsten Schritt übergeben.
4. Lokale Neu-Triangulation
Schließlich werden die ausgewählten Eckpunkte schrittweise in das Modell (Dreiecknetz) eingefügt. Das Netz wird als ein Satz von Eckpunkten realisiert, die durch Kanten verbunden sind. Das Einfügen eines Eckpunkts verändert das Netz in der Nähe dieses neuen Eckpunkts. Dies geschieht durch das Hinzufügen und Entfernen von Kanten im Netz.
Ergebnisse
Verwendet wird das System mit dem multisensoriellen 3D-Modellierer sowie mit Daten des Z+F Imager. Die Ergebnisse zeigen, dass das System auch bei größeren Datensätzen gut funktioniert. Die in den folgenden Abbildungen dargestellten Ergebnisse mit dem Modellierer zeigen den Rekonstruktionsprozess. Die Modelle werden bereits für die Greifplanung eingesetzt.

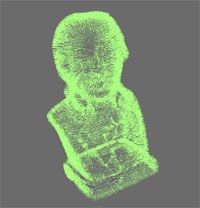
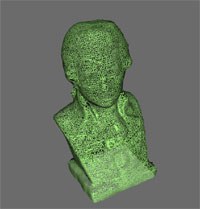
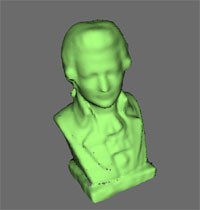
Darüber hinaus wird ein Ergebnis mit einem großen Datensatz, gemessen mit dem Z+F Imager, präsentiert.


Schwerpunkte der künftigen Arbeit:
- Steigerung der Qualität und der Genauigkeit des erzeugten Netzes: Aktuell wird die Flächennormale über die Einpassung einer Tangentialebene näherungsweise berechnet. Bei einem fortschrittlicheren Ansatz wird die lokale Krümmung in die Berechnung einfließen müssen. Über die Krümmung kann in den Phasen Eckpunktselektion und Triangulation auch der Radius der Nachbarschaft bestimmt werden.
- Erweiterung des Algorithmus im Hinblick auf Mehrfachsensorfähigkeit. Das langfristige Ziel ist die Online-Fusion von Daten verschiedener 3D-Sensoren in einem einzelnen Netz. Der nächste Schritt auf dem Weg dahin ist, jedem Punkt auf Basis des Fehlermodells des jeweiligen Sensors ein Qualitätsmerkmal zuzuweisen. Das Qualitätsmerkmal wird im Rahmen der Verarbeitungsschritte als Entscheidungsgrundlage dafür herangezogen, ob der Punkt eingefügt wird.
Publikationen
[1] T. Bodenmueller and G. Hirzinger, Online Surface Reconstruction From Unorganized 3D-Points For the DLR Hand-guided Scanner System, 2nd Symposium on 3D Data Processing, Visualization, Transmission, Thessaloniki, Greece, 2004
[2] S. Haidacher and G. Hirzinger, Estimating Finger Contact Location and Object Pose from Contact Measurements in 3-D Grasping. In Proceedings of the ICRA 2003, Taipei, Taiwan, 2003.