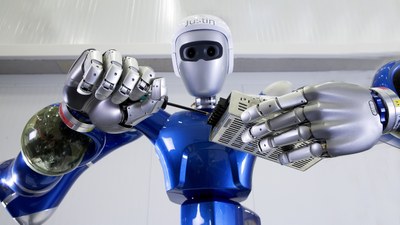
David
Der anthropomorphe Roboter David (früher DLR Hand Arm System) besitzt Gelenke mit variablen Steifigkeitsaktoren, welche eine mechanisch verstellbare Flexibilität im Antriebsstrang aufweisen. Ein Ziel bei der Entwicklung ist es, den Fähigkeiten des Menschen näher zu kommen, insbesondere im Hinblick auf Dynamik, Geschicklichkeit und Robustheit.