DLR Hand I (1998)
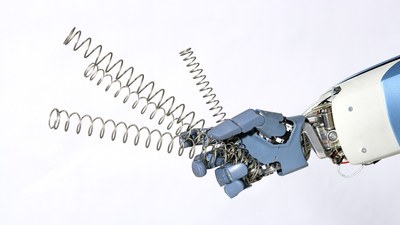
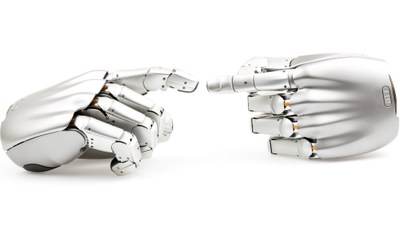
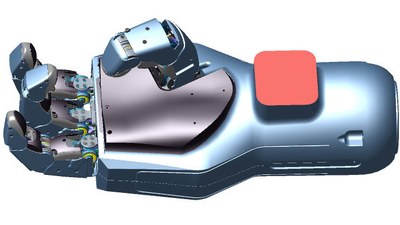
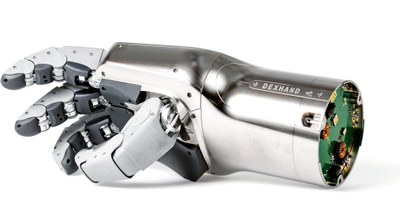
The DLR Hand I was the immediate predecessor of the DLR Hand II. Each finger shows up a 2-dof cardanic base joint realized by special designed linear actuators (artificial muscles) and a third actuator of this type integrated into the bottom finger link, thus, actuating the second link actively and, by elaborate coupling via a spring, the third link passively. The anthropromorphic fingertips are of crucial importance for grasping and manipulation, thus they are modular and easily exchangeable with specially adapted versions. Following our mechatronic design principles, literally every millimeter in the fingers is occupied by sensing, actuation and electronic preprocessing technology.