
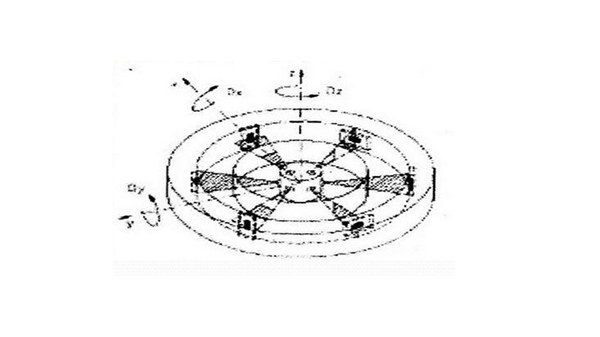

1982 – patented DLR control ball in the SpaceMouse
In the late 1970s, the Institute of Robotics and Mechatronics began research on 6-DOF input devices for robot grippers in Cartesian space. The first force-torque sensor used was based upon strain gauge technology, integrated into a plastic hollow ball. The basic concept was patented in 1982.


























{kind=link}
{kind=link}