



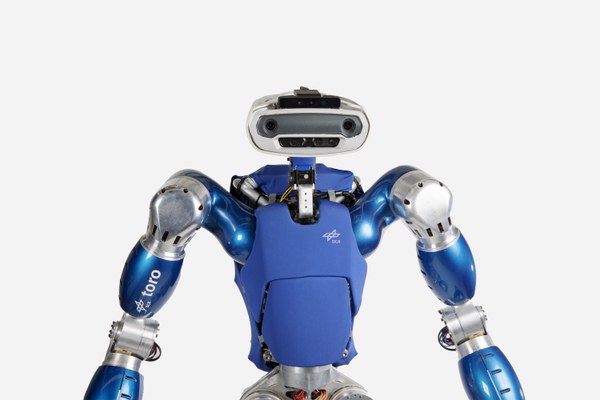
TORO
The humanoid walking robot TORO (TOrque-controlled humanoid RObot) is a research platform for scientific topics dealing with bipedal movement and dynamics. This includes things such as robust walking, climbing stairs and multi-contact scenarios.