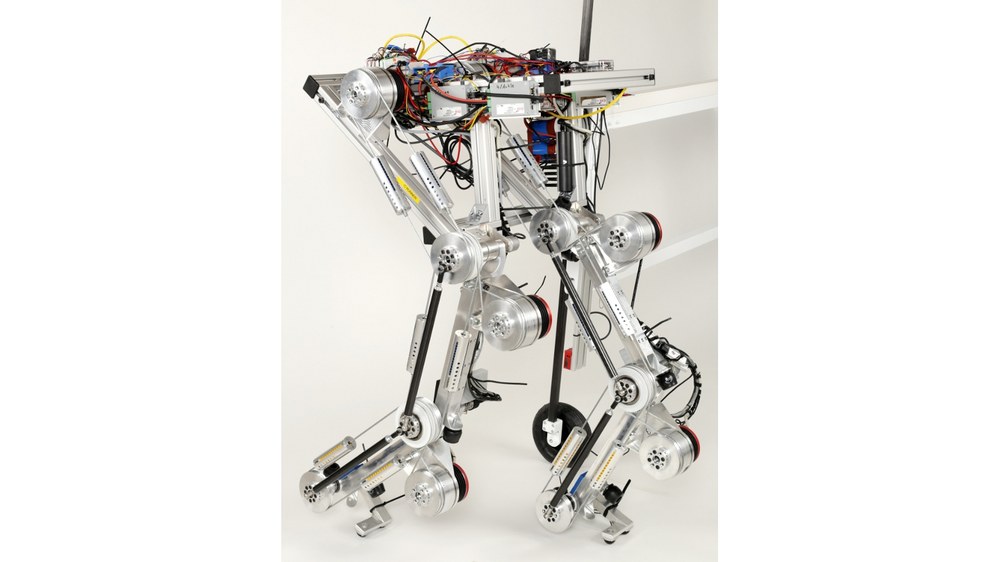
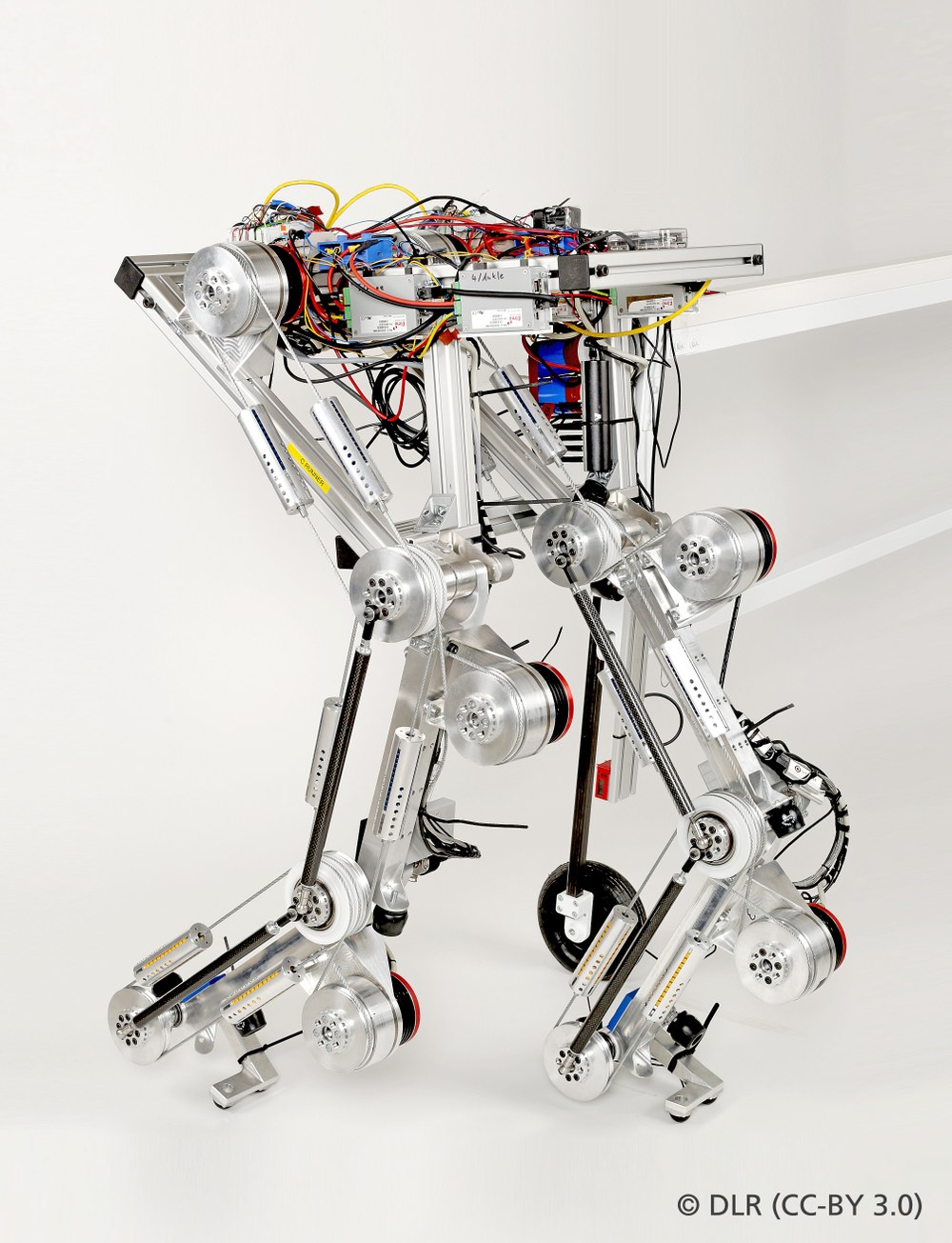
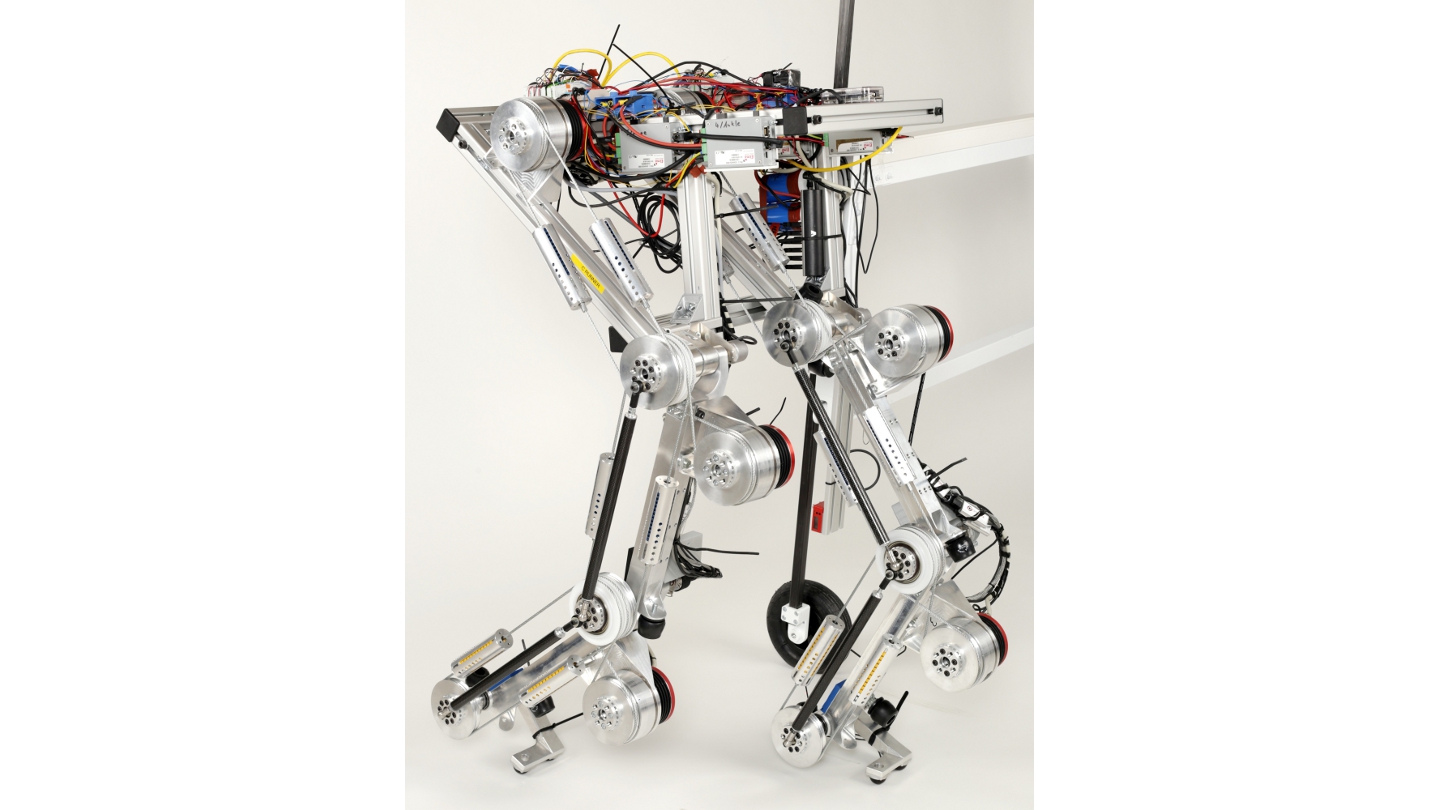
Die Laufmaschine C-Runner (Compliant Runner) ist ein Prototyp für zukünftige, nachgiebige Roboterbeine, die hohe Robustheit gegen Stöße aufweisen und darüber hinaus dazu in der Lage sind, während dynamischen Bewegungen Energie in mechanischen Federn zwischen zu speichern.
The running machine C-Runner (Compliant Runner) is a research platform for topics centered on robust locomotion on two legs. The system will be enhanced with a torso in the future to create a complete humanoid robot. The C-Runner was presented in public for the first time in 2016.
C-Runner is a prototype for robotic legs with elastic drives. The mechanical springs, which are installed between the drive and the joint, can function as intermediate energy storage. This allows far more efficient running because energy can be stored and reused at every step. These elastic elements also give the legs high impact robustness. The modular design of the robot makes it possible to test different drive concepts with physical elasticity on a single system. In addition, the effect of bi-articular couplings, such as those in human calf muscles, can be applied and understood. The findings can later be used to choose the most suitable drives for future walking robots. However, they also allow conclusions to be drawn on biomechanics, thus contributing to a better understanding of walking and running.
Humanoide Laufmaschine C-Runner
The C-Runner (Compliant Runner) is a prototype for future, resilient robot legs demonstrating high impact robustness that are also able to store energy in mechanical springs during dynamic movements.
Loeffl et al., "The DLR C-Runner: Concept, Design and Experiments", in Proc. of the 2016 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), Cancun, Maxico, pp. 758-765, November 2016.
Lakatos et al., "Dynamic Bipedal Walking by Controlling only the Equilibrium of Intrinsic Elasticities", in Proc. of the 2016 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), Cancun, Maxico, pp. 1282-1289, November 2016.


{kind=link}
{kind=link}