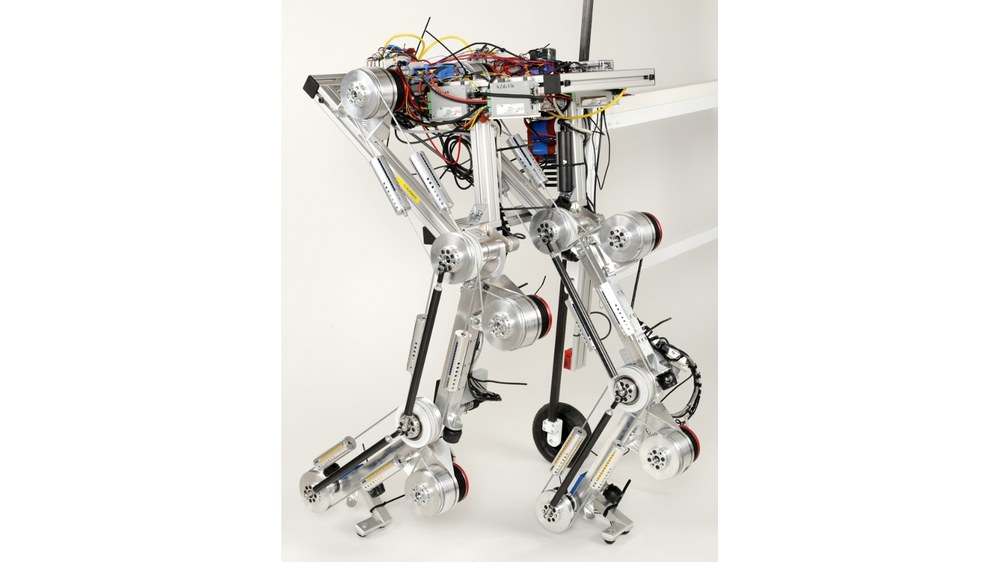
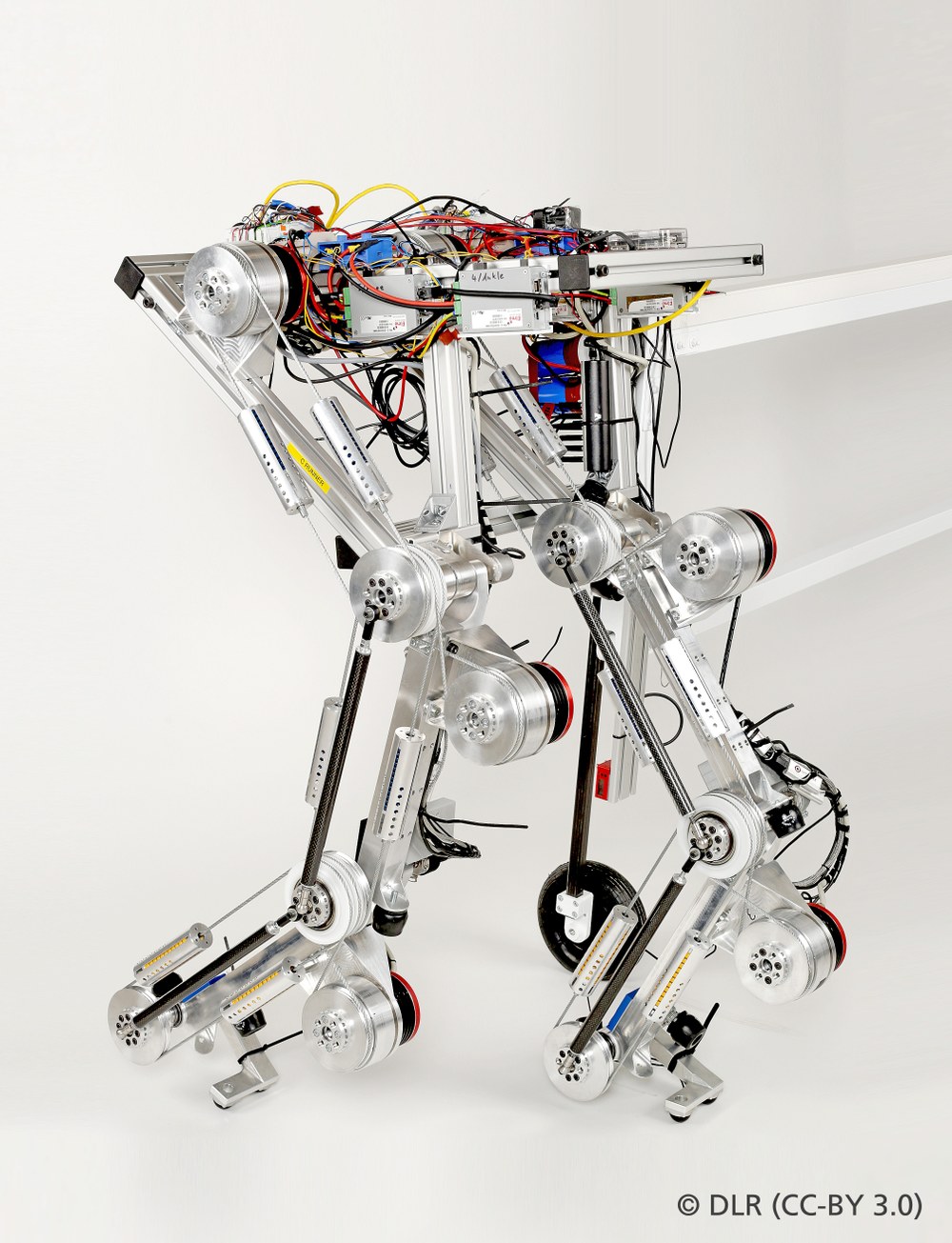
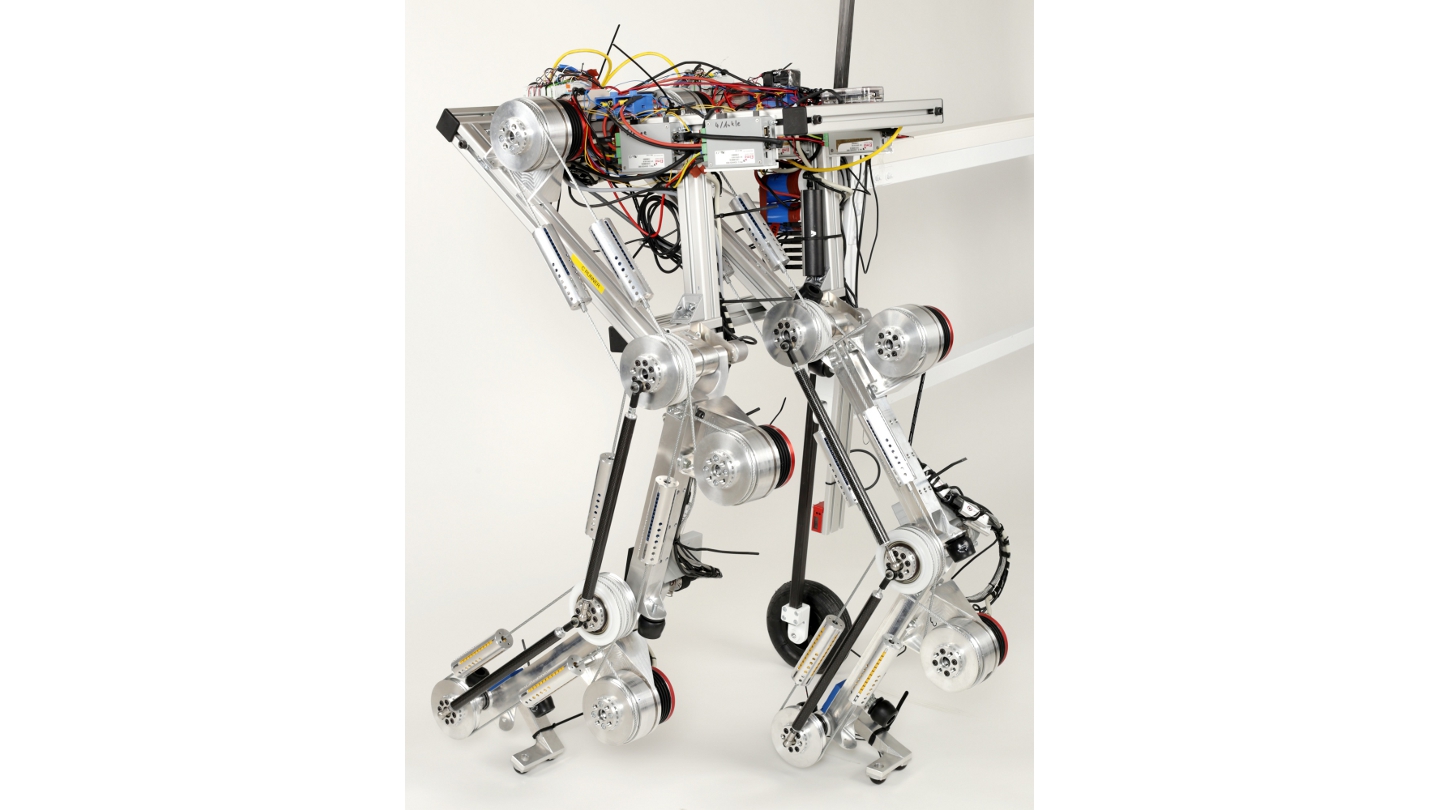
Die Laufmaschine C-Runner (Compliant Runner) ist ein Prototyp für zukünftige, nachgiebige Roboterbeine, die hohe Robustheit gegen Stöße aufweisen und darüber hinaus dazu in der Lage sind, während dynamischen Bewegungen Energie in mechanischen Federn zwischen zu speichern.
Die Laufmaschine C-Runner (Compliant Runner) ist eine Forschungsplattform für Themen rund um die robuste Fortbewegung mit zwei Beinen. Das System soll in der Zukunft um einen Oberkörper erweitert werden, um einen kompletten humanoiden Roboter zu erschaffen.
• Modulares Konzept für die Aktuierung mittels seriell-elastischer Antriebe • Variabler Steifigkeit • Multiartikulär verkoppelte Antriebe • Robust gegen Stöße
Systembeschreibung
C-Runner ist ein Prototyp für robotische Beine mit elastischen Antrieben. Die mechanischen Federn, die zwischen Antrieb und Gelenk eingebaut sind, können gezielt als Energiezwischenspeicher fungieren. Dadurch wird ein wesentlich effizienteres Laufen ermöglicht, weil bei jedem Schritt Energie gespeichert und wiederverwendet werden kann. Zusätzlich verleihen diese elastischen Elemente den Beinen eine hohe Robustheit gegenüber Stößen. Die modulare Bauweise des Roboters erlaubt es, auf einem einzigen System verschiedene Antriebskonzepte mit physikalischer Elastizität zu untersuchen. Darüber hinaus kann der Effekt biartikularer Verkopplungen, wie sie beim Menschen beispielsweise im Wadenmuskel vorkommen, angewendet und verstanden werden. Die Erkenntnisse können später dazu genutzt werden, den am besten geeigneten Antrieb für zukünftige Laufroboter auszuwählen. Sie lassen aber auch Rückschlüsse auf die Biomechanik zu und tragen so zu einem besseren Verständnis des Gehens und Laufens bei.
C-Runner humanoid running machine
Die Laufmaschine C-Runner (Compliant Runner) ist ein Prototyp für zukünftige, nachgiebige Roboterbeine, die hohe Robustheit gegen Stöße aufweisen und darüber hinaus dazu in der Lage sind, während dynamischen Bewegungen Energie in mechanischen Federn zwischen zu speichern.
Loeffl et al., "The DLR C-Runner: Concept, Design and Experiments", in Proc. of the 2016 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), Cancun, Maxico, pp. 758-765, November 2016.
Lakatos et al., "Dynamic Bipedal Walking by Controlling only the Equilibrium of Intrinsic Elasticities", in Proc. of the 2016 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), Cancun, Maxico, pp. 1282-1289, November 2016.




{kind=link}
{kind=link}
{kind=link}
{kind=link}