
Rollin' Justin


The humanoid Robot Rollin' Justin
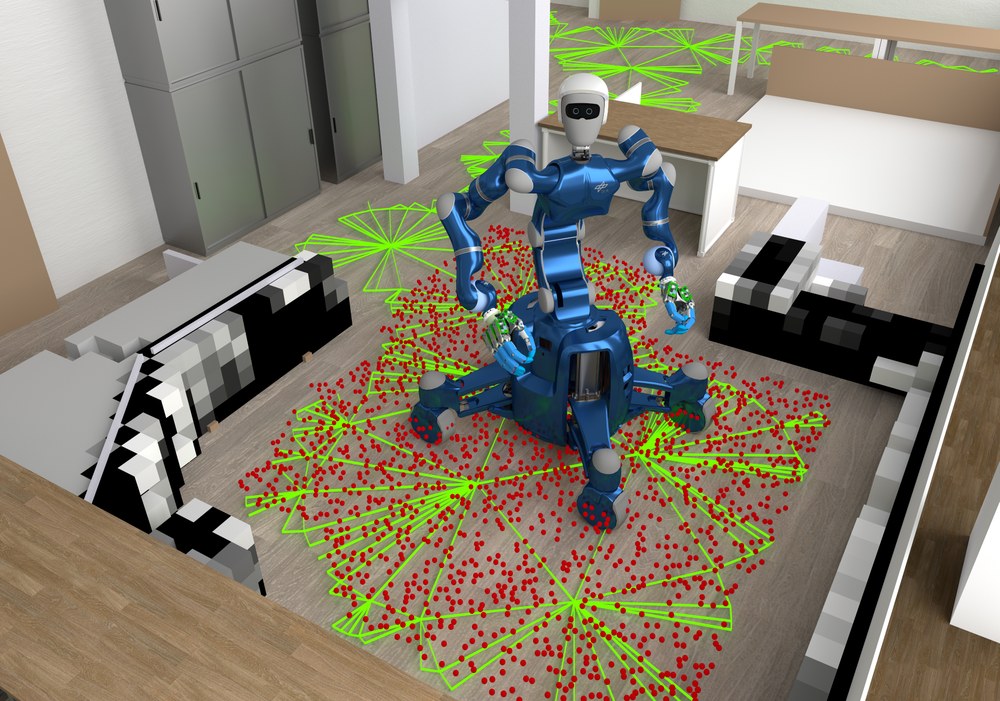
Der humanoide Roboter Rollin' Justin ist eine Forschungsplattform für autonome mobile Manipulation. In der Zukunft sollen solche Roboter für Haushaltsanwendungen sowie in der Raumfahrt eingesetzt werden.
technical data
Size: | Adult human (1.91 m) |
Weight: | approx. 200 kg |
Degrees of freedom: | 51 (platform: 8, arms: 2 × 7, hands: 2 × 12, neck: 2, torso: 3) |
Nominal load capacity: | 20 kg |
Energy supply: | Battery with operating time of > 60 min |
Speed: | 2 m/s or 7.2 km/h |
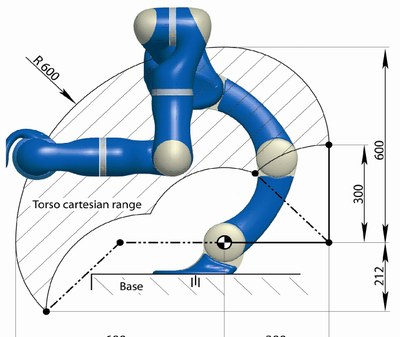
Working space: | From the floor to a height of 2.7 m |
Special features: |
|






{kind=link}
{kind=link}
{kind=link}
{kind=link}