
DLR Hand I (1998)



{kind=link}
{kind=link}
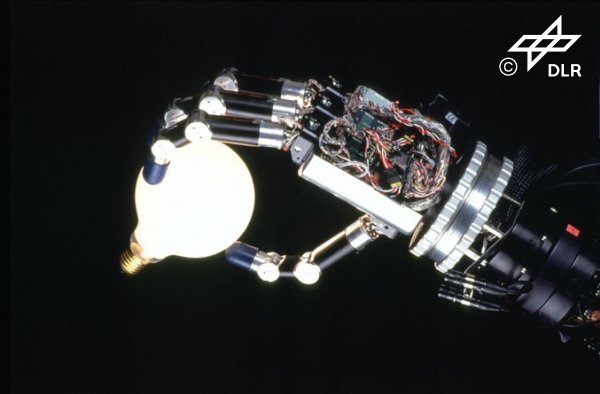
The DLR Hand I was the immediate predecessor of the DLR Hand II. Each finger shows up a 2-dof cardanic base joint realized by special designed linear actuators (artificial muscles) and a third actuator of this type integrated into the bottom finger link, thus, actuating the second link actively and, by elaborate coupling via a spring, the third link passively. The anthropromorphic fingertips are of crucial importance for grasping and manipulation, thus they are modular and easily exchangeable with specially adapted versions. Following our mechatronic design principles, literally every millimeter in the fingers is occupied by sensing, actuation and electronic preprocessing technology.
Every joint is equipped with both a joint angle sensor and a joint torque sensor. Four tactile foils detecting locus (center) and size of external forces cover all links. The finger tips typically provide a light projection laser diode to simplify image processing for the tiny stereo camera system integrated in the hand's palm. Several limit sensors, temperature sensors und one rotor position sensor per motor add to the sensor equipment.
The hand is controlled by our specially designed hand controller hardware. It is a fairly small (120x110x220 mm) but powerful box with a total mass of only 1600g.
DLR Hand I Specifications:
- cardanic base joint with 2 DOF
- 25 sensors per finger
- max. force at fingertip: 11 N
- total mass of 4 finger hand: 1800 g
Miniaturized Power Converter for DLR's Articulated Finger
A miniaturized power converter module has been developed for the DLR Hand. By choosing the most integrated solution it was possible to combine the necessary three power converters for one DLR finger in one module with the use of a minimum of space but excellent performance. Core of this module are three monolithic brushless dc motor controllers with integral high side drive circuitry. Several control signals including PWM are included. By using this highly miniaturized power converter module it is possible to integrate all drives and power circuitry for all dof of the whole hand inside the hand thus providing maximum flexibility in using the hand.

Each of the three power converters per module is able to drive a brushless dc motor with up to 5A at up to 30V. This results in a maximum theoretical power output of 450W per module. Although the weight of a complete module for three motors is only 20g. Moreover this module is decoupled from other circuitry by opto couplers which account for almost one third of the necessary space.
Sensor Developments for the DLR Articulated Hand
A dexterous robot hand needs as a minimum a set of force and position sensors to enable position control, force control and stiffness control. Special types of sensors add to this basic sensor equipment. Beside strain gauge based sensors to measure the angular momentum a newly developed optical position sensor is integrated in every joint of the DLR-Hand in order to meet the requirements. This optical joint position sensor fits in an almost human sized finger.
The sensor is based on a one-dimensional PSD (Position Sensitive Device). This PSD is illuminated by an infrared LED via an etched measurement slot. This measurement principle is known from the highly successful spin off product SpaceMouse. Using an optimized PCB design exclusively equipped with tiny SMD items and the development of a circuit with a minimized mumber of used items it was possible to create an optical position sensor with excellent performance with respect to its size. The sensor measures only 4.8 mm in thickness and 17mm in diameter. Nevertheless a voltage regulator and the complete analog signal conditioning circuit is included in the sensor itself. The angular solution is 9 Bit with a linearity error of less than 1%. By replacing the slice with the measurement slot the measurement range can be easily adapted to various requirements.
Controller Hardware Design for the DLR-Dexterous-Hand
DLR Hand I is controlled by a multiprocessor system. The controller hardware design shows a fully modular concept. The control architecture is split into two levels, the global hand control level and the local finger control level. Global and local can be understood in a geographical way. The global hand controller is externally located in a workstation running a real time operating system. Thus maximum flexibility is provided for implementing various hand control strategies. In contrast to the widely used controller hardware designs the modular local finger controllers are located next to the hand attached to the manipulator carrying the hand. This design became feasible due to the high degree of integration and miniaturization of the finger controller hardware.
Global hand controllers and local finger controllers communicate via SERCOS (SErial Real Time COmmunication System) by fiber optic link. SERCOS is powerful enough to exchange all interesting values for control within of 1ms for four fingers. The main goals taken into consideration for this design are high flexibility, easy expandability and maximum computational performance. Due to the integration of the local finger controllers as well as the complete drive system including the power converters into the hand-arm system the necessary amount of cabling carried by the manipulator arm reduces to a fiber optic link ring and a four line power supply interface.
Finger Controller Hardware Architecture
For the control of each finger module one finger controller module is necessary. Each finger module incorporates three brushless dc-motors for the three independent dof and various sensors. The controller module is an independent subsystem of the hand system and receives commands from the global control level by SERCOS via fiber optic link. One controller per finger is responsible for the information management inside the controller module. An additional 60 MFLOPS floating-point DSP provides a control hardware with sufficient computational power to realize future control algorithms for the three motors of each finger.
Identical finger control modules are put together by a common power supply to form the complete control system for the local finger level. The modular design allows the use of up to four finger control modules with the current power supply design. In order to obtain a certain number of fingers for a fixed design a redesign of the power supply can be made to get the optimal solution in respect of size and weight.

DLR Three-Finger Hand
The DLR Three-Finger Hand had been designed with regard to human anatomy, yet without the finger base joint which is typical for our four-finger hands. The finger is build as an exosceleton.
This concept provides the following advantages
- high degree of integration,
- high rigidity and lightweight structure,
- protection for the interior,
- defined basis for tactile sensors.