
New German robotics experiment ROKVISS on the ISS
Testing intelligent robot articulated units for future manned and unmanned missions
The German technology experiment ROKVISS (RObotic Component Verification on the ISS) serves to test highly integrated, modular robot components under the conditions of free space. It was developed by the German Aerospace Center (DLR) at the Oberpfaffenhofen Institute of Robotics and Mechatronics. At the same time, the experiment serves to demonstrate various new control procedures, both in automatic and so-called tele-presence mode. The experimental flight unit will be installed outside the International Space Station (ISS) in January 2005, following its launch with a Russian Progress spacecraft in December 2004. The experiment will be operated there for about one year.

{kind=link}
The components used will form the basis for new lightweight robotic elements to be used in future manned or unmanned space missions.
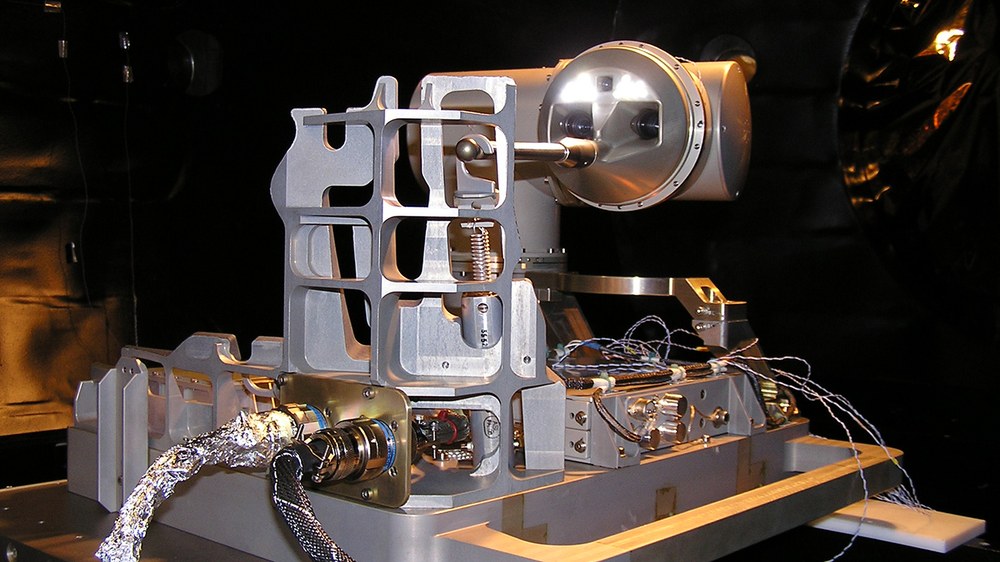
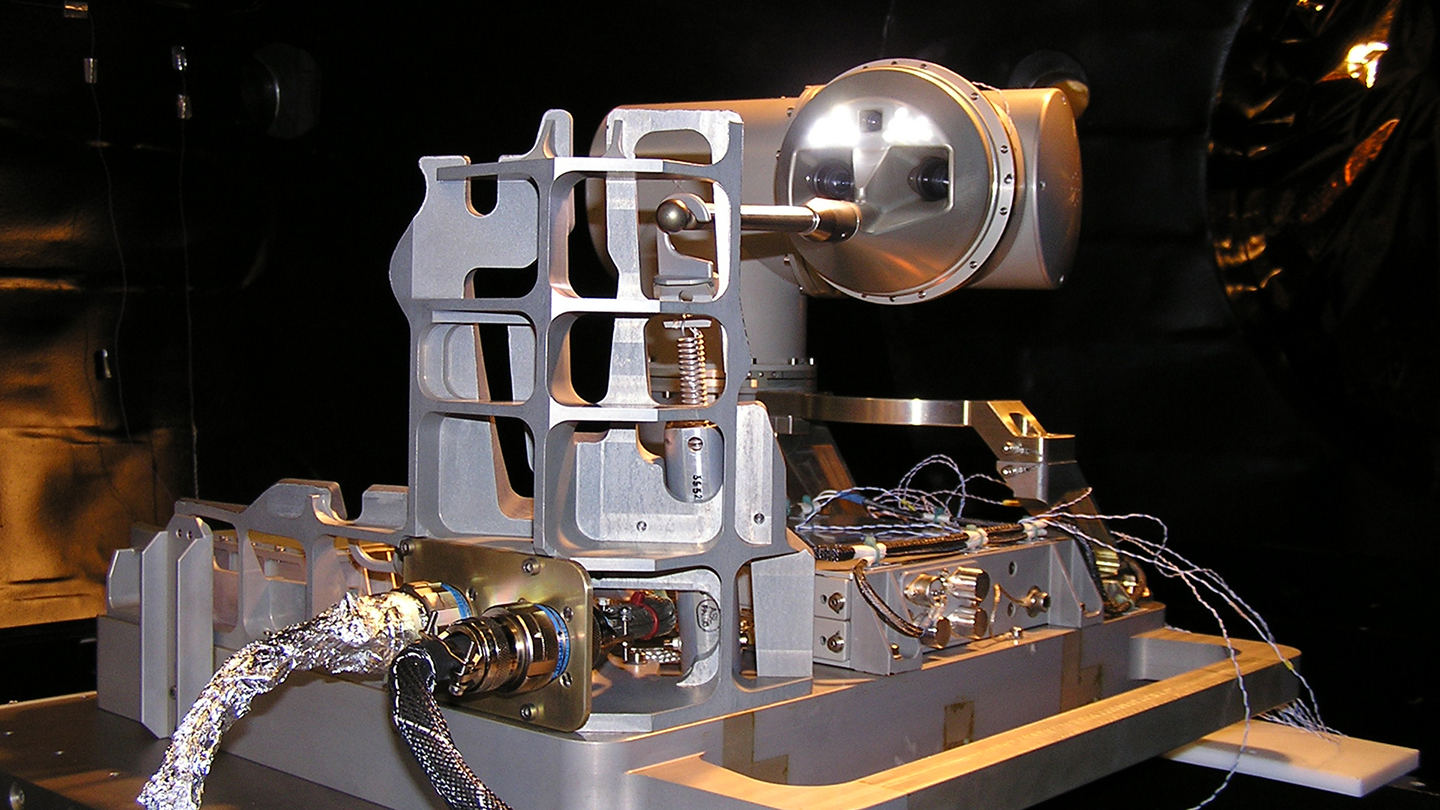
In principle, the system consists of a robot arm with two joints, a "metal finger" at the tip of the arm and a stereo video camera as well as a mono camera. These elements are mounted on a base platform on the outside of the Russian Service Module (SM) of the ISS. In addition, the base platform contains electronic boxes for power distribution and image processing as well as a special experiment contour, which is used for dynamic motion experiments on the robot and for experiments to determine joint parameters. The robot joints and cameras are controlled by a central experiment computer within the ISS.
Control from Earth in telepresence mode
During non-automatic operation, the so-called tele-presence mode, the experiment is guided by an operator on the ground. This is always possible when the ISS flies through the transmission and viewing field of the ground station in Weilheim, south-west of Munich. On-board ground-to-ground communication is ensured by a ROKVISS proprietary high rate S-band link. From on board the ISS, the images from the stereo camera are transmitted to the operator's screen, while at the same time the forces acting on the robot and the joint positions are also transmitted. The forces can be felt and felt on the joystick used by the operator. The mono-camera, which is attached to the head of the robot arm, can check the status of the ISS in the immediate vicinity and take pictures of the Earth.
Tele-presence mode is only possible during the phase of direct radio communication between the ground and the space station. The forces measured at the joints of sensors are transmitted directly to the operator's joystick. This mode requires a sophisticated up-and-down link for the robot and video data. The maximum time delay of the entire data transmission is no greater than about 10 milliseconds.
The automatic mode is used in the phase when there is no radio contact from the ship to the ground. In this mode, the experiments are controlled by the experiment computer on board the ISS and the results are stored for later analysis.
ROKVISS - Space expertise from Germany
The project is financed by the German Aerospace Center (DLR) with funds from the Federal Ministry of Education and Research (BMBF). The hardware and software has been developed and built by EADS Space Transportation in Bremen as prime contractor and the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen, which is responsible for the robotic components and the execution of experiments as well as the scientific evaluation of the results. The Munich-based company Kayser-Threde is responsible for the development and construction of the experiment computer, the power supply and technical support for the DLR institute. The company Hoerner & Sulger supplies the camera equipment with electronic accessories. The project is managed by DLR's Space Agency in Bonn. The execution of the mission is based on an agreement between DLR's Space Agency, the Russian partners of Roskosmos and RKK Energija and the Munich-based company Kayser-Threde as prime contractor for the S-band communication infrastructure.
ROKVISS - The sophisticated space experiment
For cost and safety reasons, robotic applications in space travel require the use of lightweight construction elements that must allow a high degree of mobility and interactivity. The ratio of the load to be moved by the robot and its own weight should be 1:1 if possible. The new robot concept developed by DLR is designed as a modular system consisting of the basic elements, intelligent joint drives and electronics. The aim of the experiment is to verify and test highly integrated lightweight robot elements under the real conditions of free space. In addition, new control methods for automatic operation and online control by an operator will be developed. The development of this system is based on robotic components already used terrestrially.
ROKVISS - The complex overall system
The ROKVISS system consists of several main components:
External flight unit
The basic platform is attached to the outside of the ISS, to the Russian Service Module (SM) on the so-called universal workstation. It is installed by the cosmonauts during an outboard mission. The robot arm with its two highly integrated joints is mounted on the platform, with the camera systems located at its end. The stereo camera transmits the course of the experiment, the mono camera is used for distance observation. Additional electronic units - power distribution and image processing - are also located on the platform.
In addition, there is the S-band communication unit with antenna, telemetry and telecommand box as a transmitting and receiving station of the data for controlling the experiment. The contractor for this unit is Kayser-Threde. The contour, which is also mounted on the platform, is used to perform the experiments - traversing orbits, contact operations - in automatic and telepresence mode.
Internal flight unit
The ROKVISS onboard computer controls all elements of the external flight unit and therefore all operations performed by the robot. At the same time it establishes the connection to the Russian control system and the ROKVISS S-band communication unit.
Ground segment
The flight system is controlled and monitored by the transmitting and receiving station of DLR's Space Operations Center in Weilheim, southern Germany. The ROKVISS ground control unit is also located there. This consists of a joystick with force feedback, the computers for orbit generation and image processing and a 3D image projection unit based on virtual reality.
ROKVISS - High flexibility through different operating modes
Telepresence mode
For satellite repairs and other service tasks in space, the direct involvement of an operator in the control loop is essential. The basis for this is a fast data cycle. During the direct data link from the on-board to the ground, it is possible to control the robotics experiment directly from the ground. This mode requires a so-called deterministic, very fast up-and-down link between the ISS and the ground control center for the transmission of control and video signals. The signal propagation time (physical propagation time and time to process the data) should be reduced to a minimum, i.e. operation takes place in real time. During this operation there is a direct force feedback between the on-board and the ground. Together with the stereo video images transmitted by the station, the data gives the operator a real impression of the processes on the robotic system on the ISS.
Automatic mode
Here the robot is automatically controlled by the experiment computer. The data for the automatic operation are stored on-board and transferred to the ground station for evaluation after the experiment is completed. This is done during the next radio contact following the experiment.
Outlook - What will happen to space robotics after ROKVISS?
The main goal of the development and experiment is the design of new complex robots for the use of service robots in free space. A first field of application is the mission TECSAS (TEChnology SAtellite for the demonstration and verification of Space systems). After completion of a feasibility study, the definition phase for this project was started in October 2004. The project is being carried out in cooperation with the Russian Space Agency, the Russian company Babakin Space Research Center in Moscow, German companies and institutes and the Canadian Space Agency (CSA).