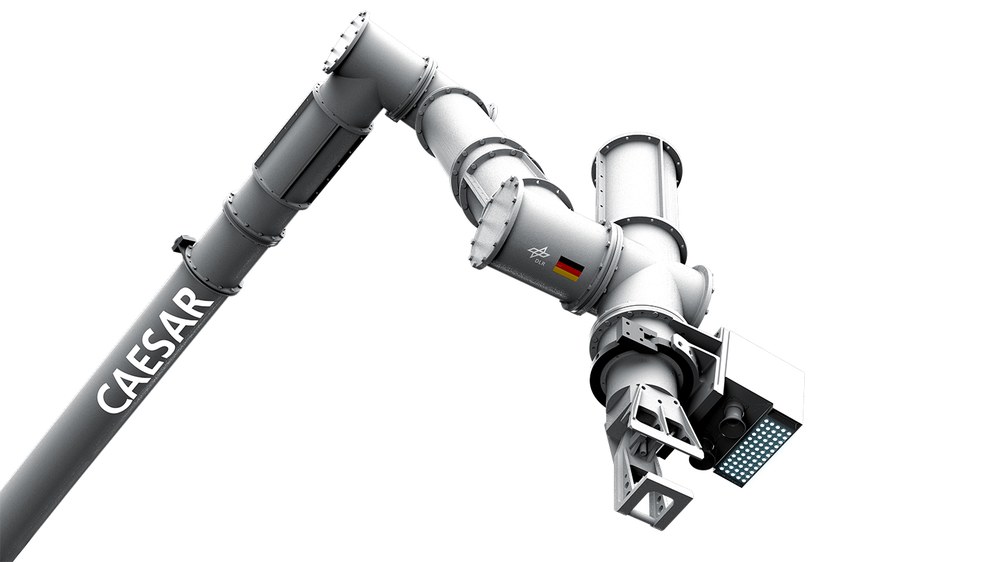
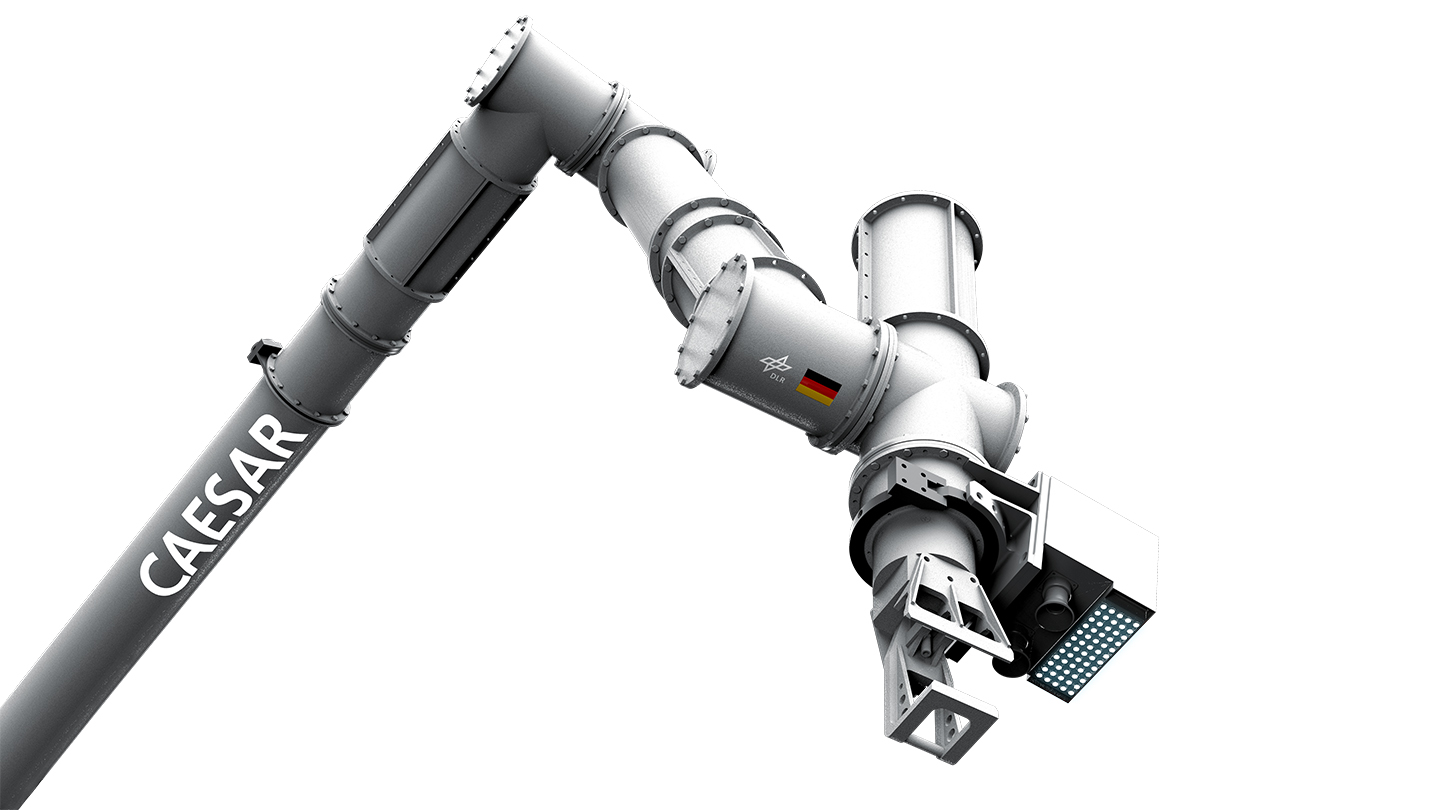
The Compliant Assistance and Exploration SpAce Robot (CAESAR) is DLR’s consistent continuation in the development of force/torque controlled robot systems. It is designed for a variety of on-orbit services e.g. assembly, maintenance, repair, and debris removal in LEO/GEO. The dexterity and diversity of CAESAR will push the performance of space robotics to the next level in a comparable way as the current intelligent and sensor based service robots changed robotics on earth.
technical data
Size:
• 2400mm minimal length at extended robot arm with 7DoF • maximum length: up to 5000mm depending on configuration
Weight:
approx. 60kg for 3m length
Degrees of freedom:
7 (roll-pitch-roll-pitch-roll-pitch-roll)
Maximum torque:
80Nm per joint
Resolution of torque:
0,1N
Max. joint speed:
up to 10°/s
Sensors:
• torque sensors in all joints • engine und output position
Communication:
• EtherCAT
Special features:
• impedance controlled • mission time up to 10 years in GEO • 40 krad TID • operational temperature: -20°C to +60°C
System description
With the development of the space-qualified robotic system CAESAR (Compliant Assistance and Exploration SpAce Robot), the Institute of Robotics and Mechatronics at DLR (DLR RM) is continuing the work on on-orbit servicing that began with DEOS. The seven degrees of freedom (DoF) robotic system is intended to be capable of catching satellites in LEO/GEO, even ones that are in tumbling, and/or non-cooperative states. The dexterity and sensitivity of CAESAR enables assembly, maintenance, and repair of satellites.
The basis is DLR’s world-famous light-weight robot technology (LWR III) which was successfully transferred to KUKA, one of the world’s leading suppliers of robotics. CAESAR is the space qualified equivalent to the current service robot systems for manufacturing and human-robot cooperation.
For CAESAR, DLR RM is developing the entire robot system including the robotic hardware and core functionalities for On-Orbit-Servicing. These include complete control of the robot, on-board task management, and stereo-based visual servoing, for instance to perform high precision assembly tasks. For grasping a non-cooperative satellite, a robust, dynamically adjustable robot path is generated on the ground. The basis is a prediction of the satellite‘s tumbling at the time of grasping. Once the satellite has been grasped, the total system is stabilized by the robot arm so that no more relative motions occur between the two satellites. The single robotic activities are to be performed semi-autonomously, in teleoperation, including telepresence mode.
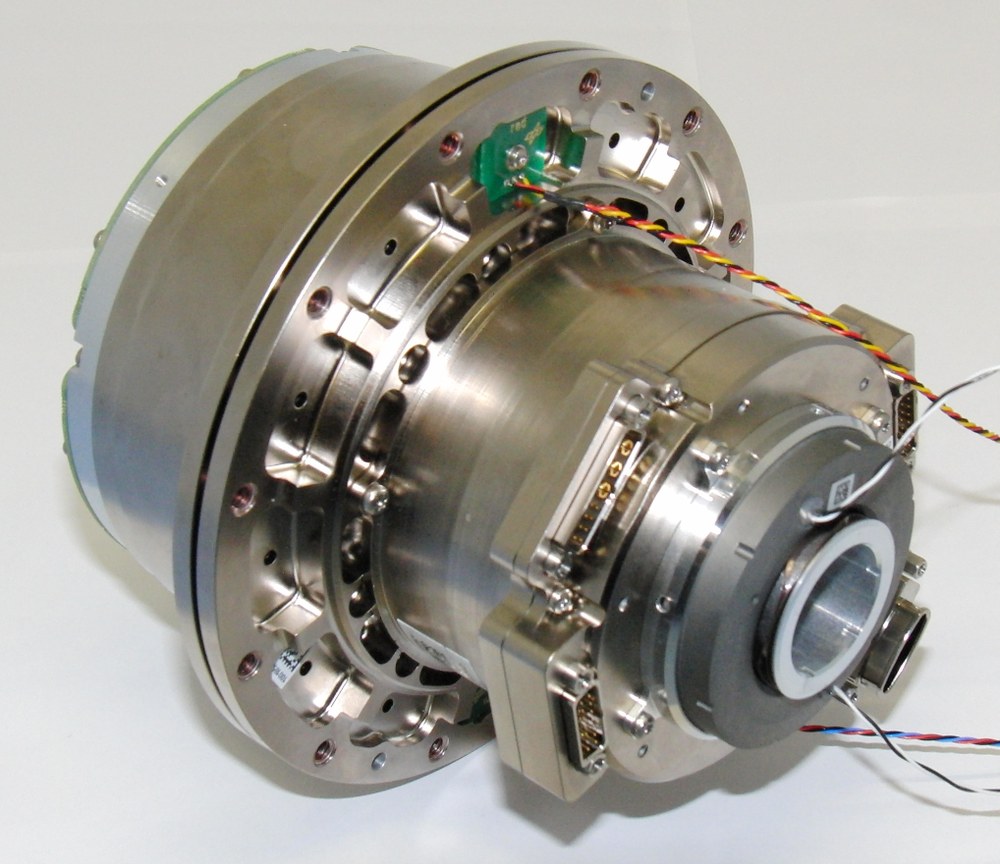
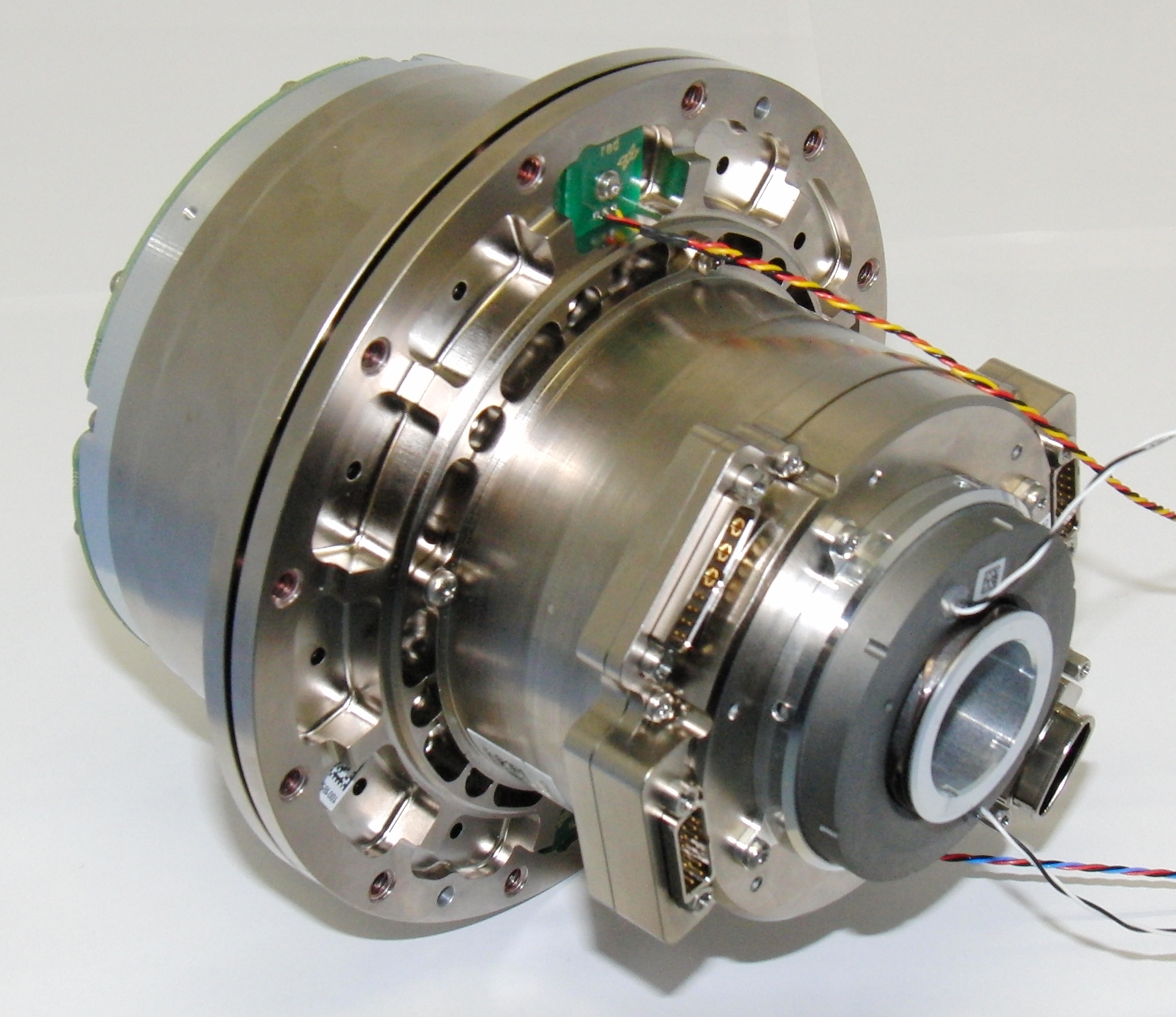
Building Block Concept: The key to CAESAR’s high performance is intelligent impedance and position controlled joints. Each joint is a building block for setting up diverse robot kinematics depending on the different mission goals. The scalability of the robot is determined by the number of joints and the length of the links. CAESAR’s seven DoF enables it to meet the dexterity and the kinematic redundancy requirements.
Cartisian control of the robot Tool Center Point (TCP):
Extending the impedance controller, the CAESAR arm can behave compliantly, while maintaining TCP position. The compliant behavior is triggered if any part of the robot detects contact with the environment. Compliance is a significant safety feature in dynamic environments or in close vicinity to the astronauts.
CAESAR: exhibit white
CAESAR is to be developed for space exploration and assistance




{kind=link}
{kind=link}
{kind=link}
{kind=link}