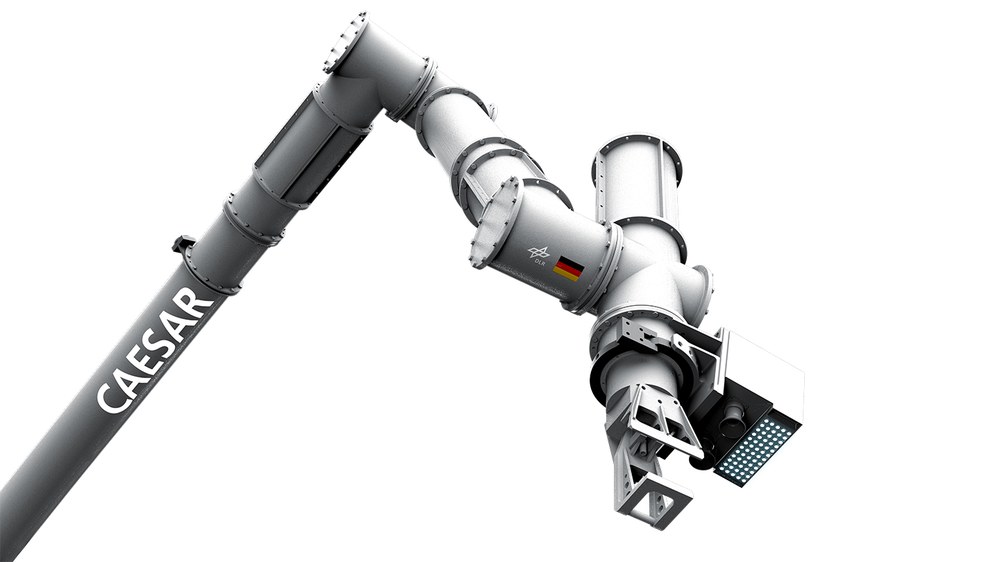
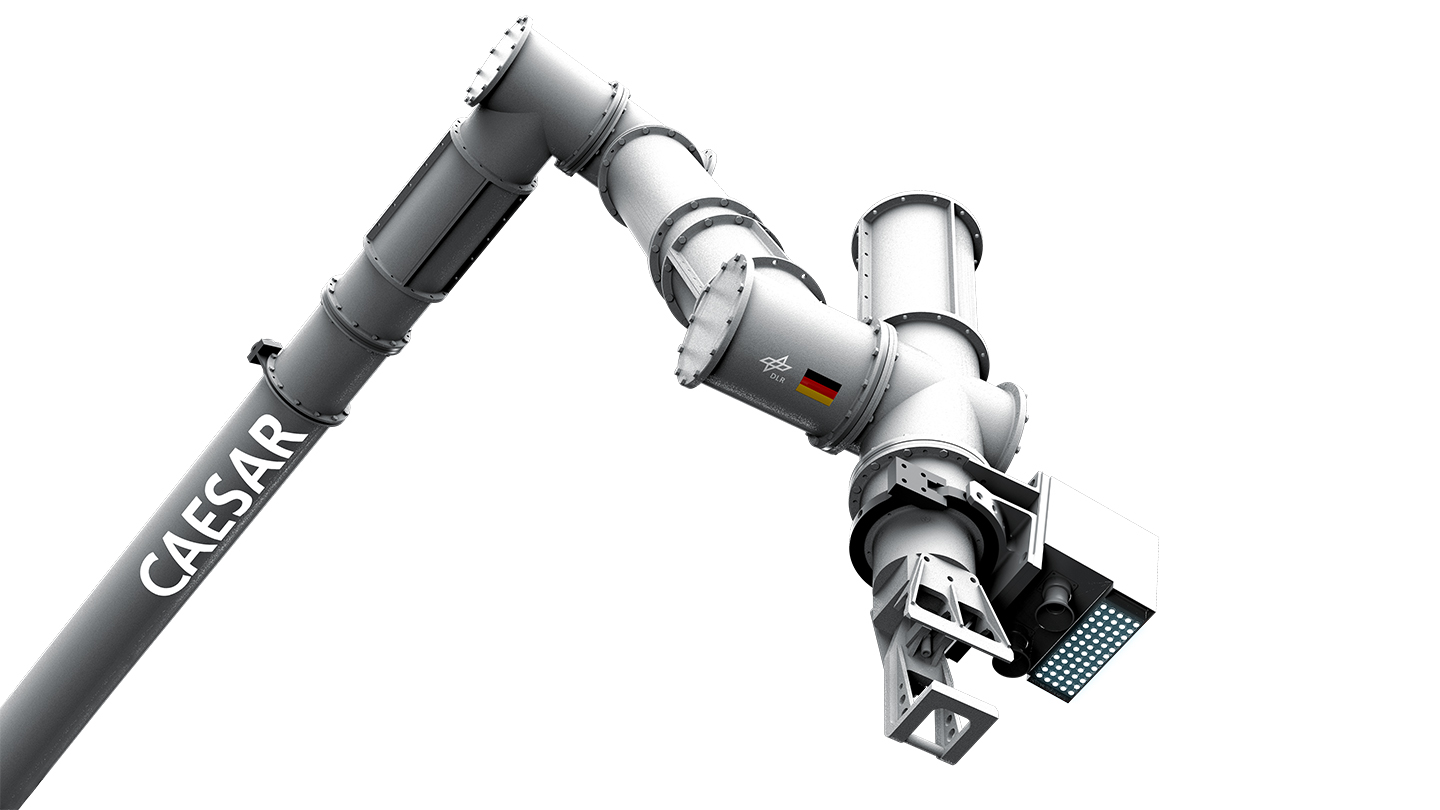
Der für Exploration und Assistenz im Weltraum entwickelte Roboter CAESAR ist die konsequente Fortführung der bei DLR-RM entwickelten Kraft- und Drehmomentgeregelten Robotersysteme. Er wurde für eine Vielzahl von Aufgaben im Weltraum entwickelt, z.B. Zusammenbau von Strukturen, Wartung und Reparatur von Satelliten oder dem Entfernen von Weltraumschrott im LEO/GEO-Orbit.
Technische Daten
Größe:
2400mm Minimal-Länge bei ausgestrecktem Roboterarm und 7DoF Maximal-Länge bis 5000mm, abhängig von der Konfiguration
Gewicht:
ca. 60kg für 3m Länge
Freiheitsgrade:
7 (roll-pitch-roll-pitch-roll-pitch-roll)
Maximales Drehmoment:
80Nm pro Gelenk
Kraftauflösung:
0,1N
Achsgeschwindigkeit:
bis zu 10°/s
Sensorik:
• Drehmomentsensoren in allen Gelenken • Motor- und Abtriebsposition
Kommunikation:
• EtherCAT
Besonderheiten:
• Impedanzgeregelt • Missionszeit bis 10 Jahre im GEO • 40 krad TID • Temperaturbereich -20°C bis +60°C
Systembeschreibung
Mit der Entwicklung des weltraumqualifizierten Robotersystems CAESAR (Compliant Assistance and Exploration SpAce Robot), setzt das Institut für Robotik und Mechatronik im DLR die Arbeiten an Robotern für den Einsatz im Weltraum fort. Die Entwicklung begann mit ROKVISS und wurde im On-Orbit-Servicing-Projekt DEOS fortgeführt. Diese neue Robotergeneration vereint innovative Elektronik und Mechanik mit neuen Regelungsverfahren. Ähnlich wie ein menschlicher Arm besitzt der Roboter sieben Freiheitsgrade, was ihm gegenüber Standardrobotern eine höhere Flexibilität verleiht. Diese Flexibilität erlaubt ihm auch, taumelnde oder nicht kooperative Satelliten im LEO/GEO zu greifen und zu stabilisieren.
Die Basis bildet die weltweit bekannte Robotertechnologie des DLR (Leichtbauroboter III), die erfolgreich an die Firma KUKA, einen der weltweit führenden Roboterhersteller, transferiert wurde. CAESAR ist ein weltraumqualifiziertes Äquivalent zu den gegenwärtigen Servicerobotern, die in der Fertigung und für Mensch-Roboter-Kooperationen eingesetzt werden. Durch seine Fähigkeiten und der Flexibilität für die vielfältigen Einsatzbereiche von CAESAR wird die Weltraumrobotik auf eine Stufe mit intelligenten und sensorbasierten Servicerobotern auf der Erde gestellt.
DLR-RM entwickelt für CAESAR das gesamte robotische System, bestehend aus der Hardware und den Software-Grundfunktionen für On-Orbit-Servicing. Diese beinhalten die gesamte Regelung des Roboters, die On-Board-Software und Stereo-basiertes Visual Servoing für hochpräzise Montageaufgaben. Für das Greifen eines nicht kooperative Satelliten wird in der Bodenstation eine robuste, dynamisch anpassbare Bahn für den Roboter generiert. Als Basis der Bahnplanung dienen Voraus-Berechnungen der Taumelbewegung des Satelliten für den Zeitpunkt des geplanten Griffs. Wenn der Satellit gegriffen wurde, wird das Gesamtsystem durch die Impedanzregelung stabilisiert, so dass es keine Relativbewegung mehr zwischen beiden Satelliten gibt. CAESAR kann sowohl semi-autonom, teleoperiert oder durch Telepräsenz mit Kraftrückkopplung betrieben werden.
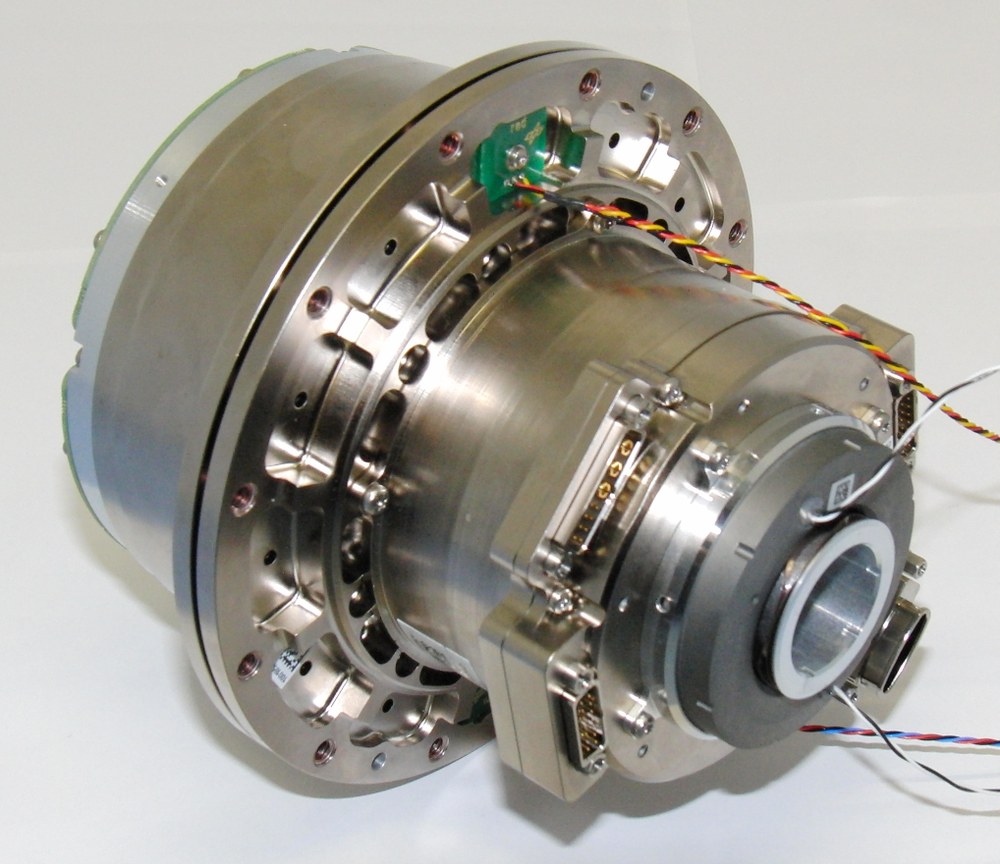
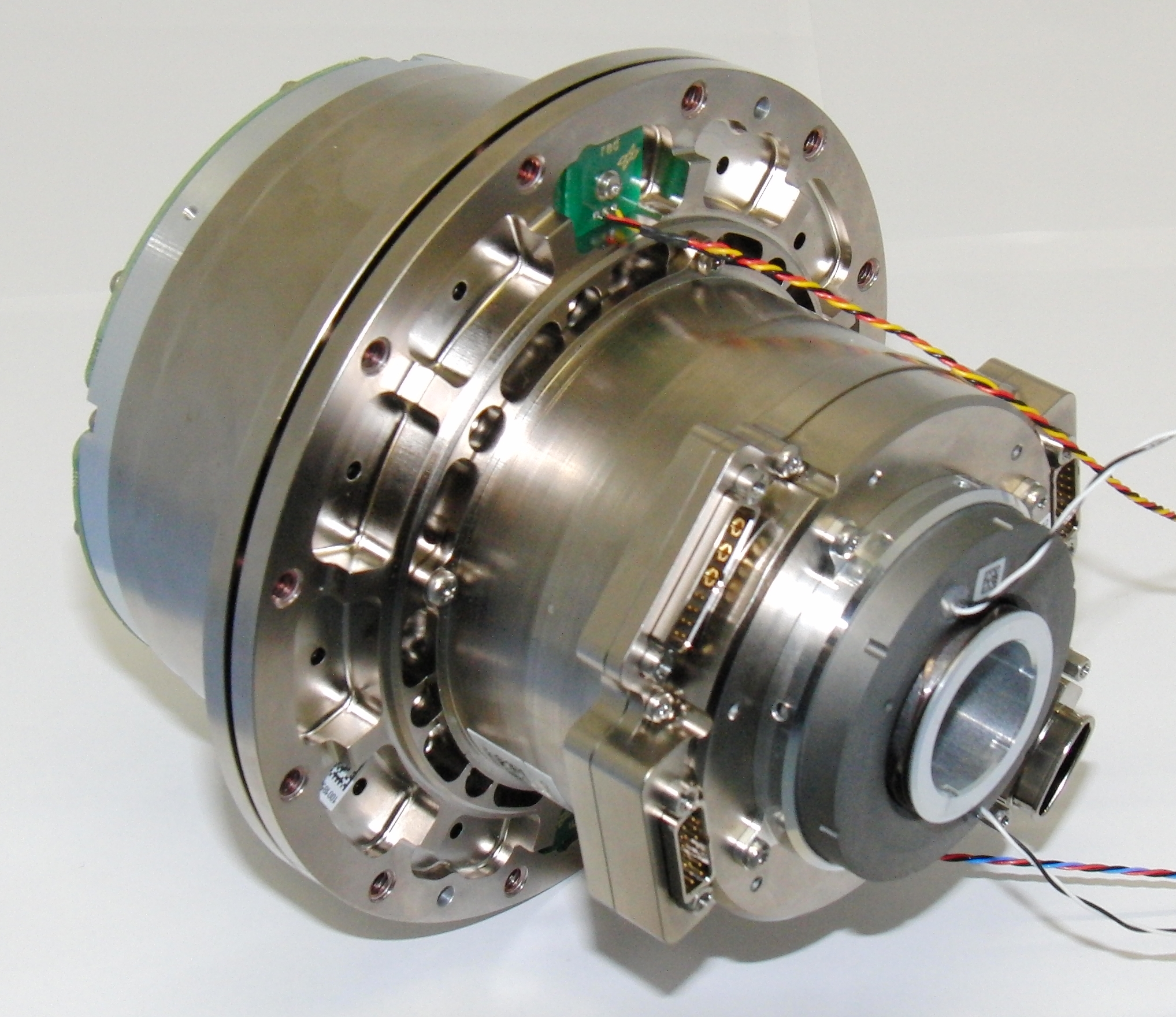
Baukasten-Prinzip: Der Schlüssel für CAESAR‘s Leistungsfähigkeit sind intelligente Impedanz- und Positionsgeregelte Gelenke. Die einzelnen Gelenke können dabei, jeh nach Missionsanfoderungen variabel in verschiedenen Kinematiken angeordnet werden. Dadurch wird der Roboter skalierbar, die Anzahl der Gelenke und die Länge der Verbindungselemente können fast beliebig variiert werden. Mit sieben Gelenken kann die Flexibilität des menschlichen Arms, mit kinematischer Redundanz nachempfunden werden. Karthesische Regelung des Roboters am Tool Center Point (TCP): Durch die Impedanzregelung bleiben die Gelenke des CAESAR Arms nachgiebig, während er eine feste TCP Position hat. Durch die eingebaute Drehmomentsensorik kann jeder ungewollte Kontakt mit der Umgebung festgestellt und darauf reagiert werden. Die Nachgiebigkeit ist ein wesentliches Sicherheitsmerkmal in dynamischen Umgebungen und bei der Zusammenarbeit mit Astronauten.
CAESAR: Exponat weiß
CAESAR wird für die Exploration und Assistenz im Weltraum entwickelt




{kind=link}
{kind=link}
{kind=link}
{kind=link}