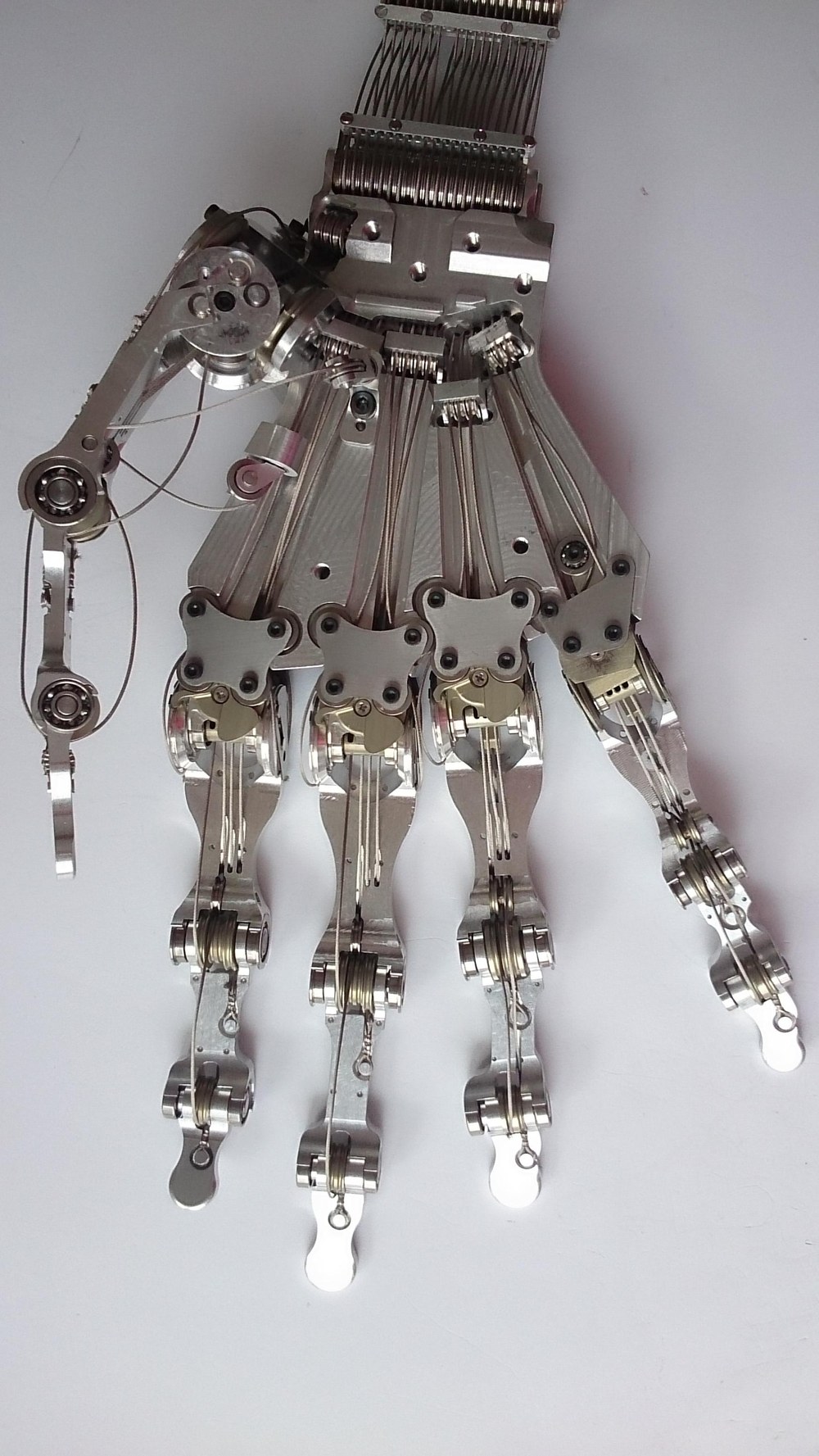
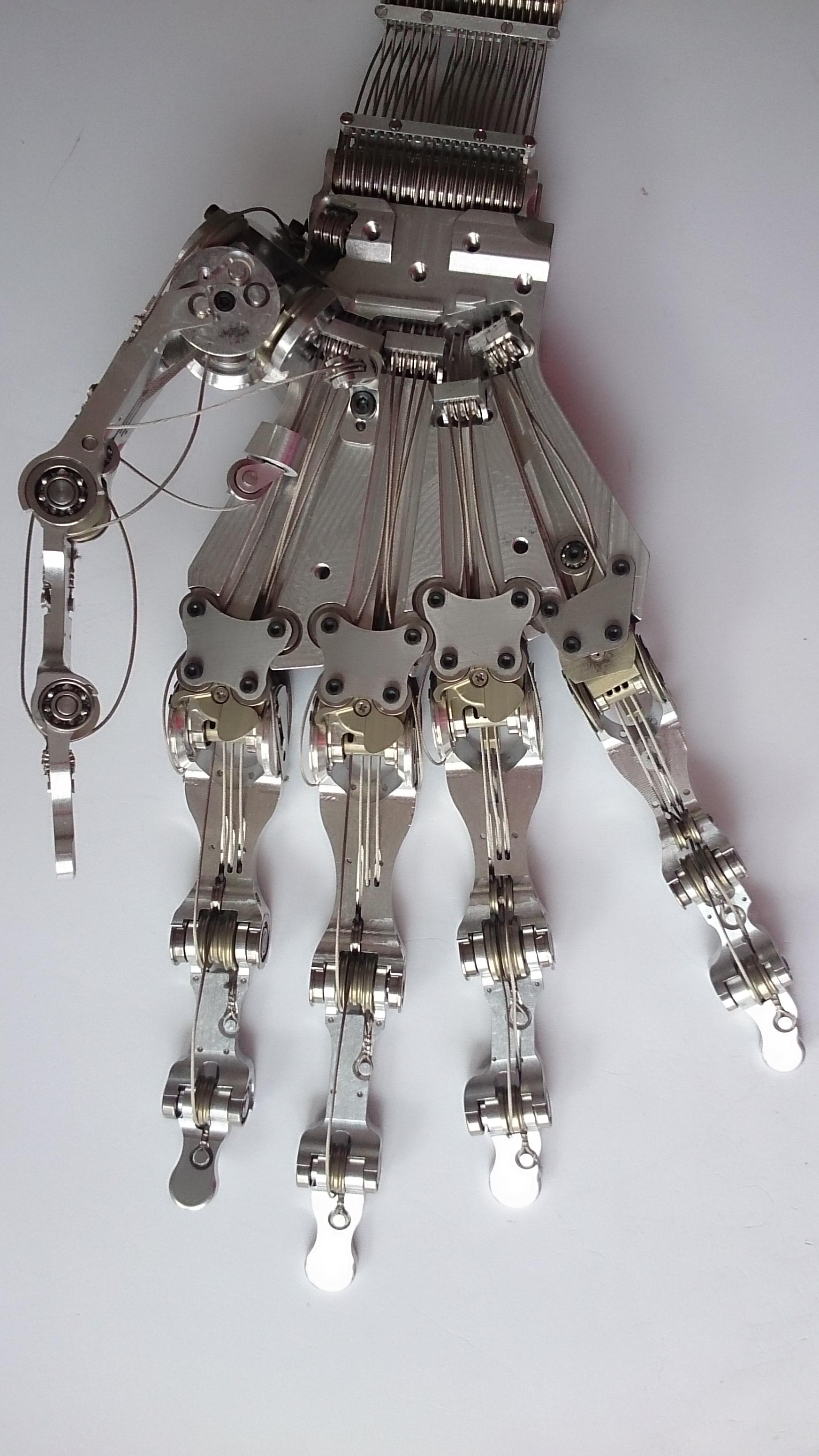
Ähnlich zum Menschen besitzt Davids Hand 20 Freiheitsgrade, um eine Vielzahl an Objekten greifen zu können. Die Hand wird dabei über Sehnen durch Motoren im Unterarm angetrieben.
Robot hands are normally first in contact with the environment and should withstand hard contacts. Variable compliance systems as realized in David can handle impacts and store energy for periods of time. 2010 the first version was shown at the tradefair Automatica, follwed 2014 by the second version with ball bearings in the finger joints, shown on right picture.
technical data
Weight:
4,5kg (with wrist)
Degrees of freedom:
20
Payload:
20 N active Fingertip force with steel tendons, 40 N with Dyneema
Speed:
approximately 720°/s active for each joint, passive 20000°/s while snipping
Sensors:
36 Spring deflection sensors plus 36 motor position sensors
Power supply:
12 V & 5 V power supplies and distribution
Communication:
4 FPGAs
Features:
Embedded structuralwater cooling
Embedded structural electronic feed-in layer
36 intelligent motor modules with integrated 180W power inverters
Spring deflection sensors
System description
In contrast to our other robot hands, David's hand has no sensors and actors in the hand. The actors and sensors are located in the forearm of the handarmsystem. This allows building a hand with the size and dexterity of a human. Every joints is actuated human like by two motors. The hand can control its position and its passive joint stiffness simulatneously with an nonlinear spring mechanism coupled to the tendons. The decoupling from the gear and output makes it very robust against hits and allows the system to run stable with low controller frequencies. The system is used to compare different tendon couplings and degree of freedoms. Furthermore dynamic grasping combined variable stiffness is explored.
David-Hand
The intrinsic elastic Robot David is equipped with springs in order to be flexible and robust against unknown impacts.
Similar to humans, David's hand is equipped with 20 degrees of freedom enabling it to grasp a broad variety of objects. The hand is operated via tendons with motors in the forearm.
Friedl et al. (2015) FRCEF: The new friction reduced and coupling enhanced finger for the Awiwi hand. In: Proc. IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), 03-05 November 2015, Seoul
Friedl et al. (2011) FAS A flexible antagonistic spring element for a high performance over actuated hand. In: Proc. IEEE/RSJ Int Intelligent Robots and Systems (IROS) Conf, IROS 2011, 25.-30. September 2011, San Francisco
Chalon et al. (2010) The thumb: Guidelines for a robotic design. International Conference on Intelligent Robots and Systems (IROS 2010), 18-22 Oct 2010, Tapei
Grebenstein et al. (2010) A Method for Hand Kinematics Designers 7 Billion Perfect Hands. 1st International Conference on Applied




{kind=link}
{kind=link}
{kind=link}