The hand can be used on a robot, but also in hand in hand experiments, whre humans carry the hand. For this a battery and a force feedback handle can be mounted.
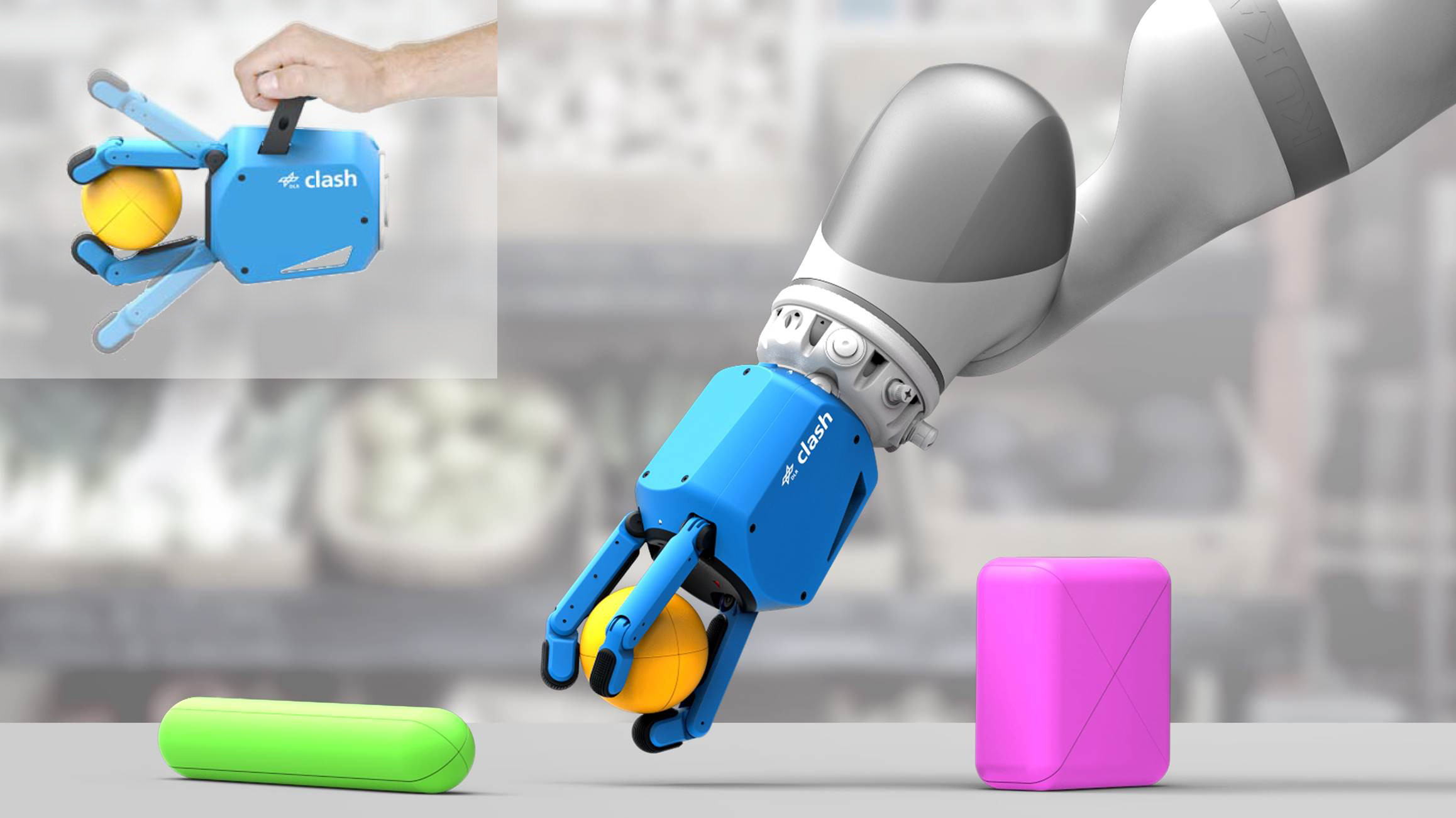
The Hand CLASH (Compliant Low-cost Antagonistic Servo Hand) was designed during the EU Project Soma to grasp safely and reliably fruits and vegetables. It is a compliant, yet low-cost hand.
technical data
Size:
110 × 60 × 78 mm³
Weight:
640g
Degrees of freedom:
7
Payload:
20N thumb, 10N fingers
Power supply:
6–8V
Joint velocity:
360°/s
Interface:
USB 1kHz
Features:
linux computer can be integraded
battery powered, if necessary
8 tendon force sensors
tactile sensors in palm
human-inspired tendon routing
System description
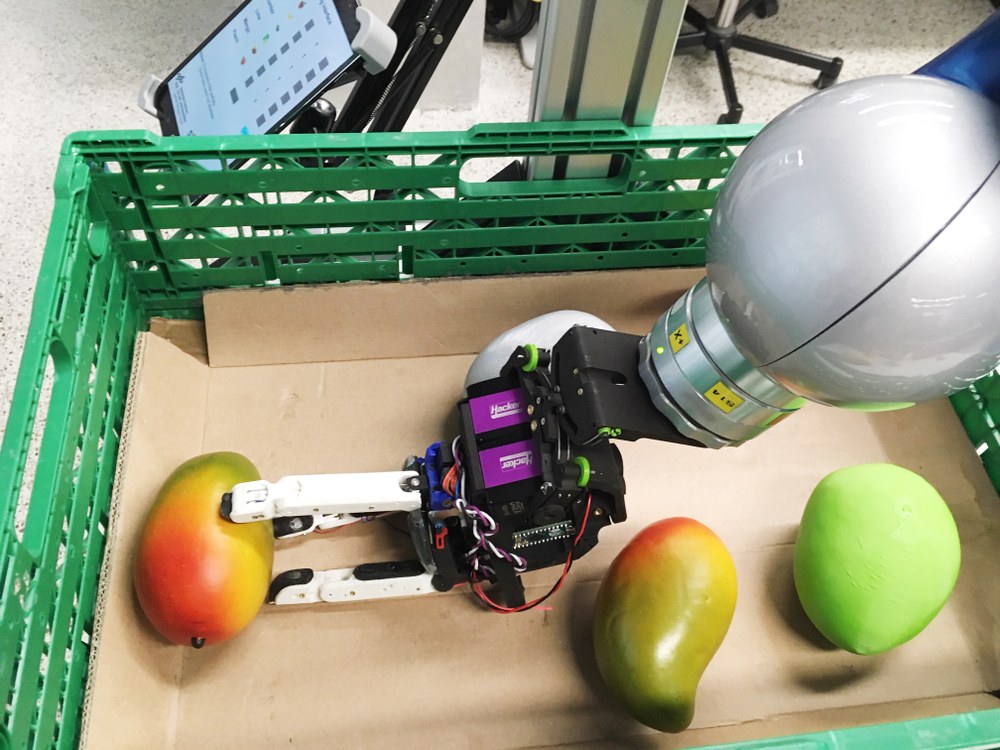
A main feature of this hand is that it can adapt the compliance of the fingers passively by changing the pretension of the tendons. Furthermore the compliance can be actively controlled similar to the DLR Hand II. For example if the hand grasps a mango, in the contact phase of the grasp the hand is very soft to reduce the contact forces and increase the area of contact. In the lift phase the hand increases the stiffness to get a stable grasp. This mechanism is inspired by humans hands, where contraction of the muscle leads to an increased hand stiffness.
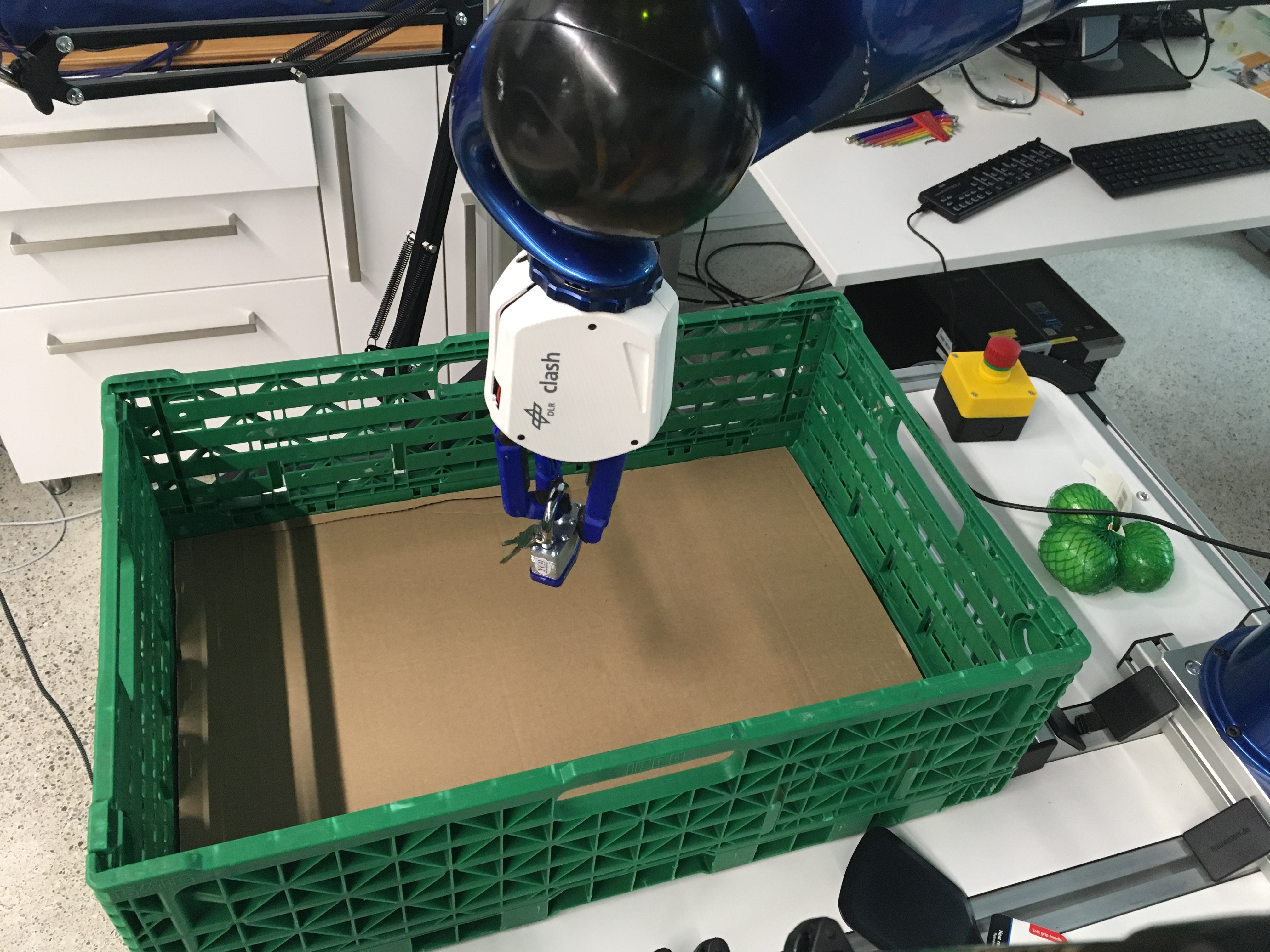
CLASH graps a lime
The hand was developed especially for grasping fruits and vegetables, as can be seen here on a lime. The Use Case is the online supermarket, where robots will be able to do these jobs in the future.
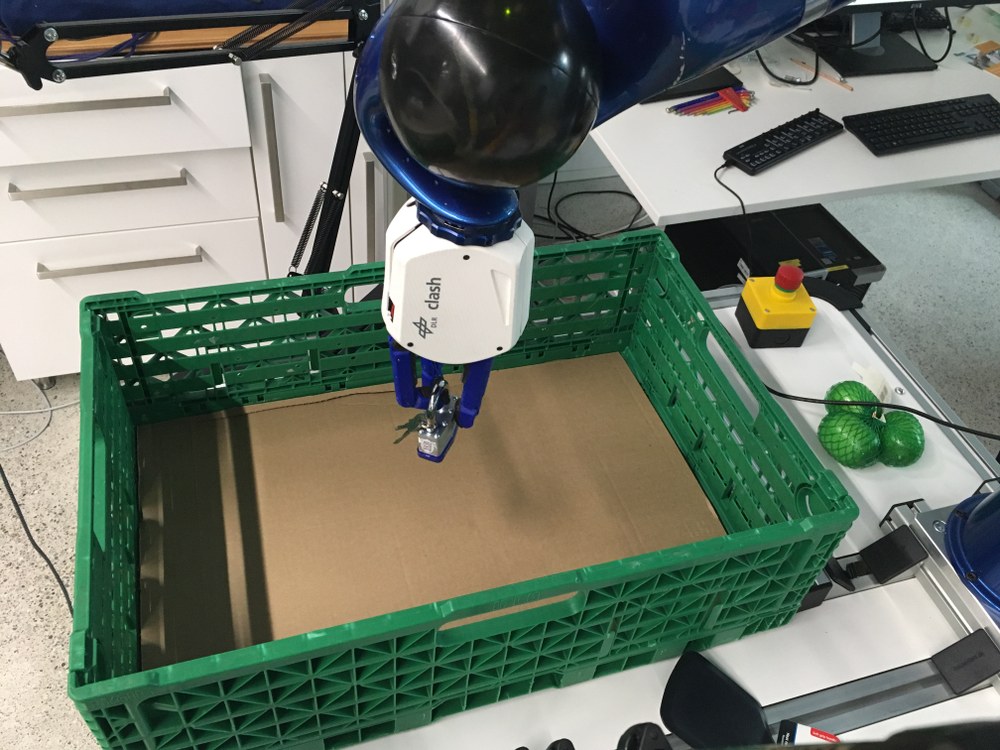
A major focus of the EU project SOMA was to use the environment as a tool to grasp objects better. The CLASH wrist now allows the wall grip to be carried out in the box without restricting the range of movement of the robotrarm.
Friedl et al. (2018) CLASH: Compliant Low cost Antagonistic Servo Hands. In: Proc. IEEE/RSJ Int Intelligent Robots and Systems (IROS) Conf, IROS 2018, 1.-5. October 2018, Madrid [elib]
Friedl et al. (2019) CLASH WRIST - A hardware to increase the capability of CLASH fruit gripper to use environment constraints exploration, IROS Workshop: Factory of the Future, November 2019, Macao [elib]
Friedl et al. (2020) CLASH —A Compliant Sensorized Hand for Handling Delicate Objects, Frontiers in Robotics and AI, Januar 2020, https://www.frontiersin.org/article/10.3389/frobt.2019.00138 [elib]




{kind=link}
{kind=link}
{kind=link}
{kind=link}