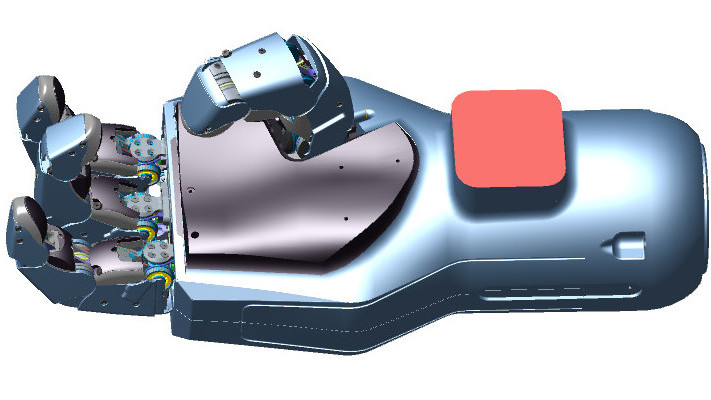
The Spacehand is a space qualified robotic hand, designed for long term operation in geosynchronous Orbit. It is the further development of the DLR DEXHAND.
technical data
Size:
0,35 m × 0,20 m × 0,15 m (EVA glove size)
Weight:
5 kg
Degrees of freedom:
12
Payload:
25 N active Fingertip force (Thumb 40 N), passive 90N – streched out
Sensors:
12 joint torque sensors
Power supply:
18 V – 34 V
Communication:
• SpaceWire
Computer:
DSP and FPGA on board control
Features:
Designed for geosynchronous orbits
Actuation and electronic integrate in the hand
Radiation tolerant design
Tendon driven fingers
Motormodules as new modularization concept
20W (idle), 60W (operation), 100W (peak)
Fully integrated electronic
Heaters for wide range of enviroment temperatures
Brushless DC motors
Onboard power managment
System description
In the last decade, the number of satellites around earth had a tremendous growth. It is pushed forward by our massive reliance of new communication technologies, as well as the increasing importance of weather forecasting and disaster management. Satellite manufacturer are strongly interested in technologies to inspect, maintain and ultimately repair their equipment, in the continuous effort of maintaining cost efficiency, and optimizing the use of resources. Although humans are still the most versatile solution, the associated costs and risks limits the viable commercial solutions. Robotic systems represent a cost effective approach as they can be telemanipulated from ground or semi-autonomously. All major space agencies are and have been developing robotic solutions. In particular, the ESA started the DEXHAND project in 2011 to evaluate how performant current robotic hand technologies are. In these issues the DEXHAND was developed to use and manipulate most of the astronauts EVA-Tools. The experience of the Hand II design and the tendon driven Hand-Arm-System Hand paired with ROKVISS heritage led to the DEXHAND design. Shortly after the end of the DEXHAND project, several space agencies manifested their interest in using the DEXHAND design in their robotic missions. DLR started in 2014 the Spacehand project to develop the DEXHAND to a space qualified Spacehand.
Current status: Originally the Spacehand was foreseen for the DARPA Phoenix (later RSGS) project, started in 2013. This mission aims at demonstrating the capabilities of a multi-armed satellite services with tool changing capabilities. The Spacehand was one of the foreseen tools, able to solve the most delicate tasks in case the regular tool set does not provide the adequate tool.
The development of the Spacehand was finished in the mid of 2019 with the completion of the EQM.
Publications
Chalon et al., "Spacehand: a multi-fingered robotic hand for space", ASTRA 2015
Chalon et al. (2011) Dexhand: a Space qualified multi-fingered robotic hand. In: Proceedings of the International Conference on Robotics and Automation (ICRA), 9-13 May 2011, Shanghai, China.
Wedler et al. (2011) Dexhand: a Space qualified multi-fingered robotic hand. In: Proceedings. ASTRA, 11th Symposium on Advanced Space Technologies in Robotics and Automation, 12.–14. April 2011, Noordwijk, Netherlands
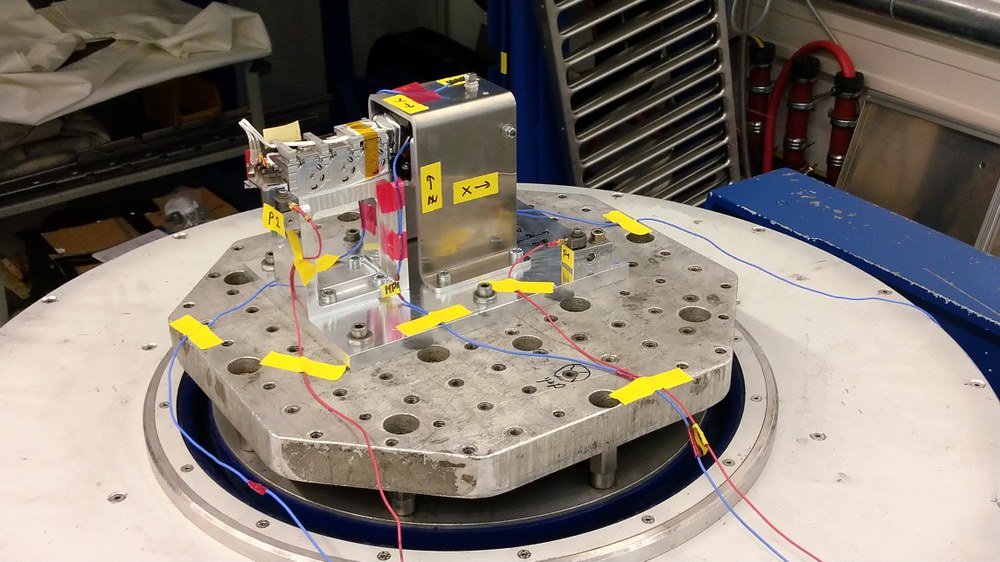
The finger was tested, to see if it will survive a hard rocket lunch. All three direction were tested and after each test a function test of the finger was done, to detect failure. The test was successful for the system.





{kind=link}
{kind=link}
{kind=link}
{kind=link}