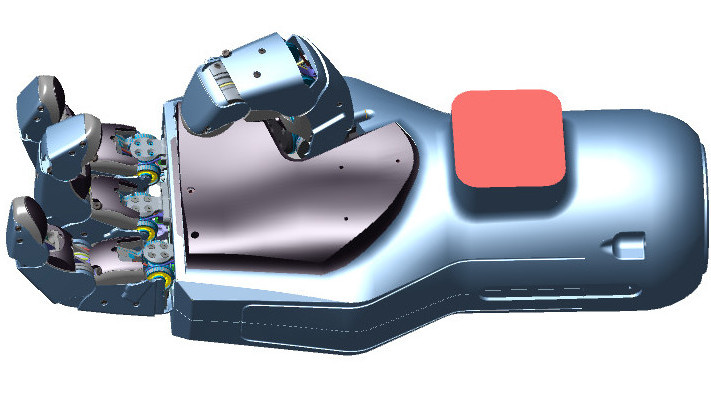
Die DLR Spacehand ist eine weltraumqualifizierte Roboterhand, die für den Langzeiteinsatz im geostationären Orbit entwickelt wurde. Die Hand ist die Weiterentwicklung der DLR DEXHAND.
Technische Daten
Größe:
0,35 m × 0,20 m × 0,15 m (Abmessung wie Astronautenhandschuhe)
Gewicht:
5 kg
Freiheitsgrade:
12
Nominale Nutzlast:
25 N aktive Fingerspitzenkraft (Daumen 40 N), 90 N passive Fingerspitzenkraft
Sensorik:
12 Gelenkdrehmomentsensoren
Energieversorgung:
18 V – 34 V
Kommunikation:
SpaceWire
Rechner:
Kombination von DSPs und FBGAs
Besonderheiten:
Weltraumqualifiziert (robust gegenüber Strahlung)
Aktuierung über Elektromotoren mittels Sehnen
Antrieb und Elektronik integriert in der Hand
Seilbetriebene Finger
Strahlungsresistentes Design mit integriertem Lachup Schutz
Heizung für ein breites Einsatzspektrum
Systembeschreibung
In den letzten Jahren wuchs die Anzahl der Satelliten im Erdorbit rapide an. Immer neue Kommunikationstechniken sowie der Bedarf an besseren Wettervorhersagen lässt die Anzahl schnell weiter steigen. Daher sind die Hersteller von Satelliten sehr interessiert an Technologien, die ihnen es ermöglichen, Satelliten zu warten und im Notfall sofort zu reparieren, um die Lebensdauer der Systeme zu maximieren. Im Moment werden vorzugsweise Astronauten für solche Missionen eingesetzt, trotz hoher Risiken und Kosten. Deshalb stellen telemanipulierte robotische Systeme eine kostengünstige Alternative dar. Daher arbeiten alle Raumfahrtagenturen an der Verwirklichung von robotischen Assistenz-Systemen. Die ESA startete im Jahr 2011 das Roboterhand Projekt DEXHAND, um terrestrische Roboterhände in den Weltraum zu bringen. Dazu wurde das DLR beauftragt, eine Roboterhand zu entwickeln, die alle Werkzeuge, die Astronauten bei EVA Einsätzen verwenden, bedienen kann. Die Erfahrung aus der DLR Hand II, der Hand des seilbetrieben Hand-Arm-Systems und aus dem Weltraum Projekt ROKVISS flossen in die Entwicklung der DEXHAND ein. Nach dem Ende des ESA-Projekts zeigten mehrere Weltraumagenturen Interesse an einer Weiterentwicklung der DEXHAND. Vom DLR wurde daher das interne Projekt Spacehand ins Leben gerufen, um eine für den Einsatz im geostationären Orbit qualifizierte Roboterhand anbieten zu können.
Entwicklungsstand: Ursprünglich war die Spacehand für die im Jahr 2013 begonnene DARPA-Phoenix (später RSGS) Mission vorgesehen. Diese Mission hatte das Ziel, die Fähigkeiten von Servicesatelliten zu erforschen, die mit mehreren Roboterarmen und den entsprechenden Tools bestückt sind. Die Spacehand war eines der eingeplanten Werkzeuge und sollte es ermöglichen, schwierige unvorhersehbare Aufgaben zu lösen.
Die Entwicklung der Spacehand wurde nach Fertigstellung eines EQMs Mitte 2019 beendet.
Veröffentlichungen
Chalon et al., "Spacehand: a multi-fingered robotic hand for space", ASTRA 2015
Chalon et al. (2011) Dexhand: a Space qualified multi-fingered robotic hand. In: Proceedings of the International Conference on Robotics and Automation (ICRA), 9-13 May 2011, Shanghai, China.
Wedler et al. (2011) Dexhand: a Space qualified multi-fingered robotic hand. In: Proceedings. ASTRA, 11th Symposium on Advanced Space Technologies in Robotics and Automation, 12.–14. April 2011, Noordwijk, Netherlands
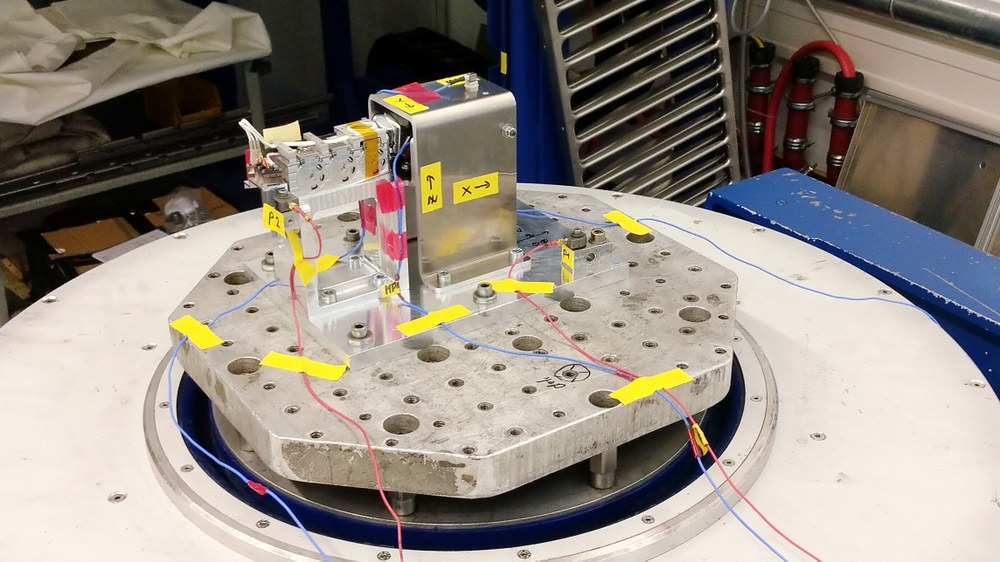
Ein Finger der Spacehand wurde zusammen mit dem Launchlock auf einem Vibrationsshaker getestet. Der Test dient dazu den Raketenstart zu simulieren und mögliche Beschädigungen dadurch zu erfassen. Nach jedem Versuch wurde der Finger getestet, um mögliche Veränderungen zu erfassen. Der Test verlief erfolgreich.





{kind=link}
{kind=link}
{kind=link}
{kind=link}