Mittels des robotischen Arms ROKVISS (Robotikkomponenten-Verifikation auf der ISS) wurden Steuerungskonzepte der Telepräsenz sowie die Zuverlässigkeit der hoch entwickelten Gelenkelektroniken geprüft. Ziel ist es, in Zukunft Roboter zu bauen, die auf der Raumstation oder auch in weiter entfernten Umlaufbahnen arbeiten können.
Das System wurde erstmals 2005 an der ISS (International Space Station) in Betrieb genommen.
Technische Daten
Größe:
50 cm
Gewicht:
7 kg
Arbeitsraum:
Optimiert für den Einsatz im Weltraum
Benutzerschnittstellen:
Direkte Fernsteuerung über Telepräsenz/Automatischer Modus
Besonderheiten:
• 2 integrierte Kameras • 2 Gelenke und ein Metallfinger • Extrem widerstandsfähig gegen hohe Temperaturschwankungen • Weltraumerprobt • System zur automatischen Abschaltung der Stromversorgung im Falle eines Kurzschlusses
Systembeschreibung
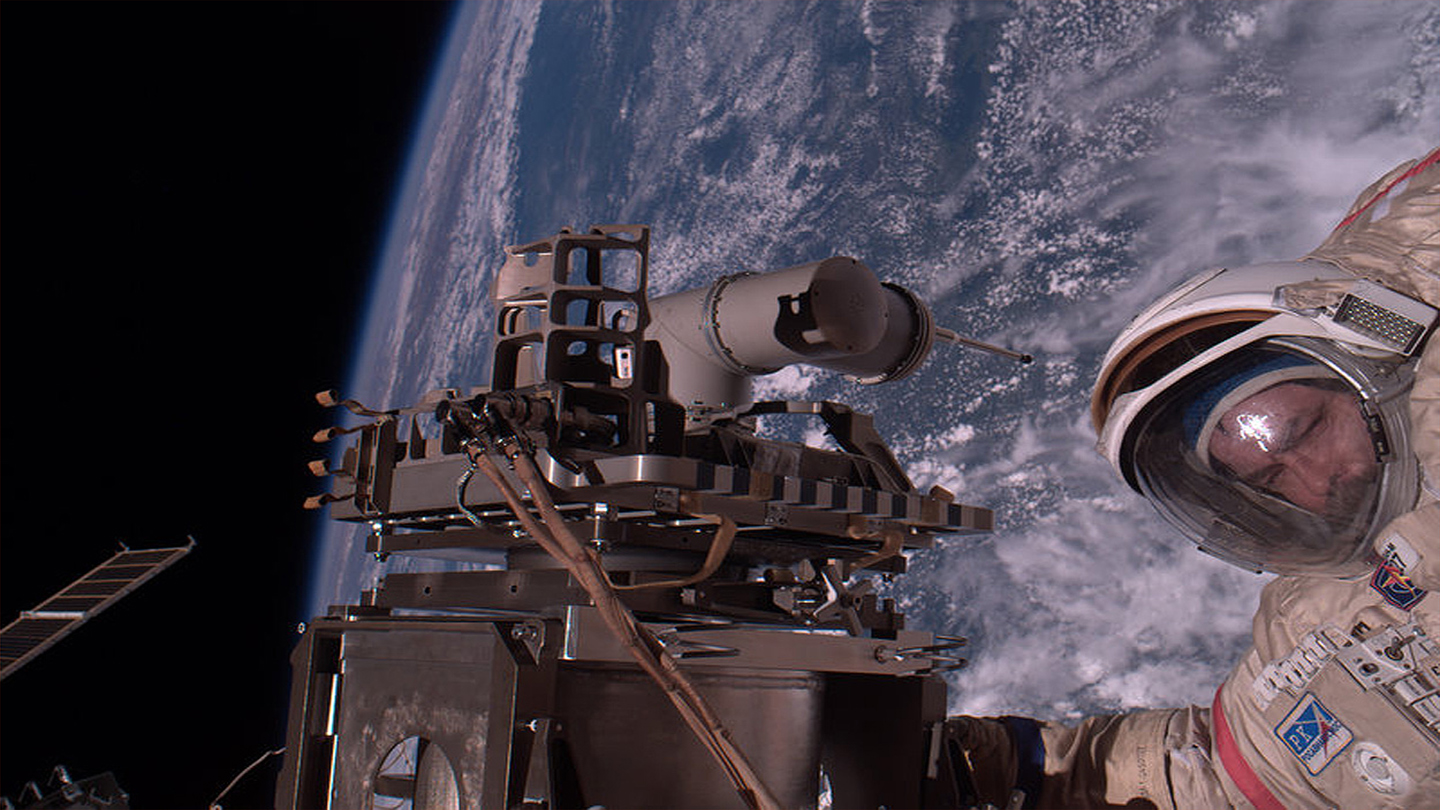
Fünfeinhalb Jahre lang (2005–2010) wurde der robotische Arm im Weltraum betrieben und hat dabei rund 500 Tests erfolgreich absolviert. Das System wurde am 26. Januar 2005 bei einem etwa sechsstündigen "Weltraumspaziergang" an der ISS montiert. Dazu befestigten die Astronauten eine sogenannte Universalplattform an der Außenwand des russischen Servicemoduls Zvezda, auf welchem ROKVISS anschließend installiert wurde.
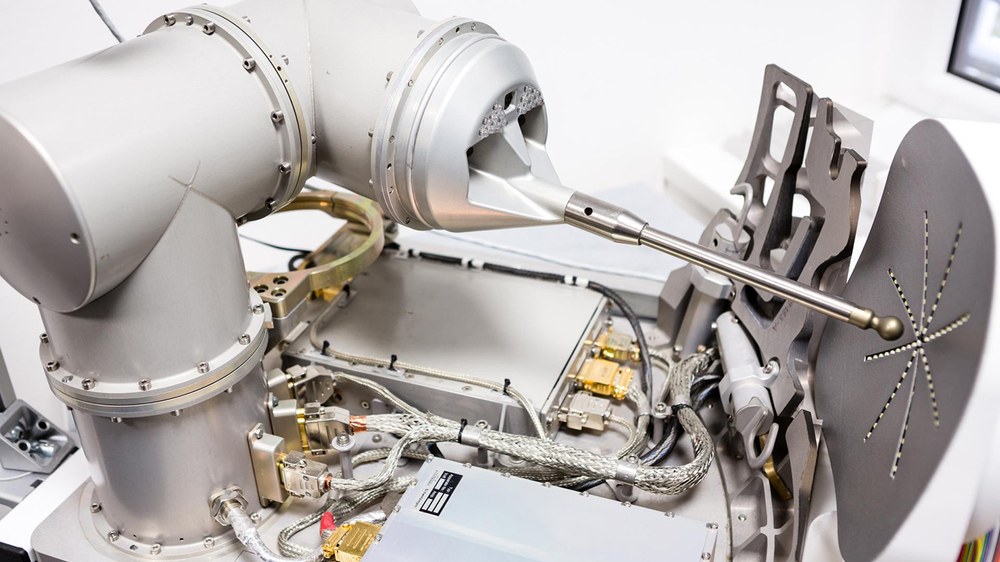
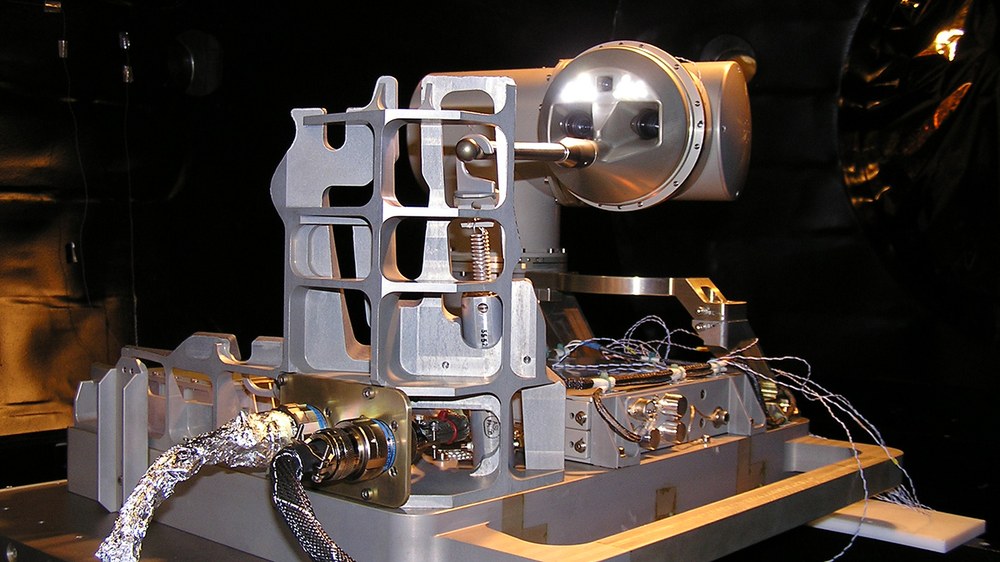
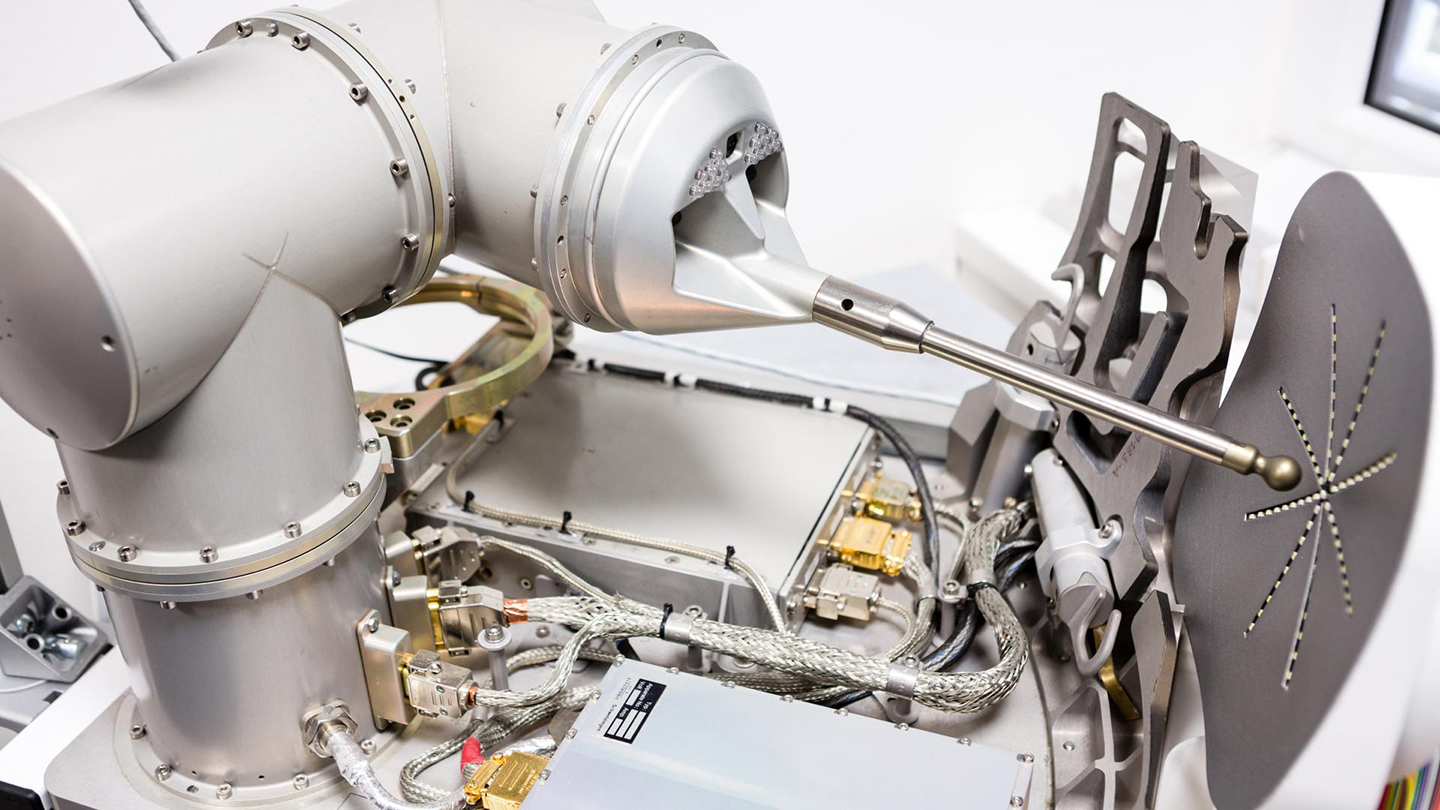
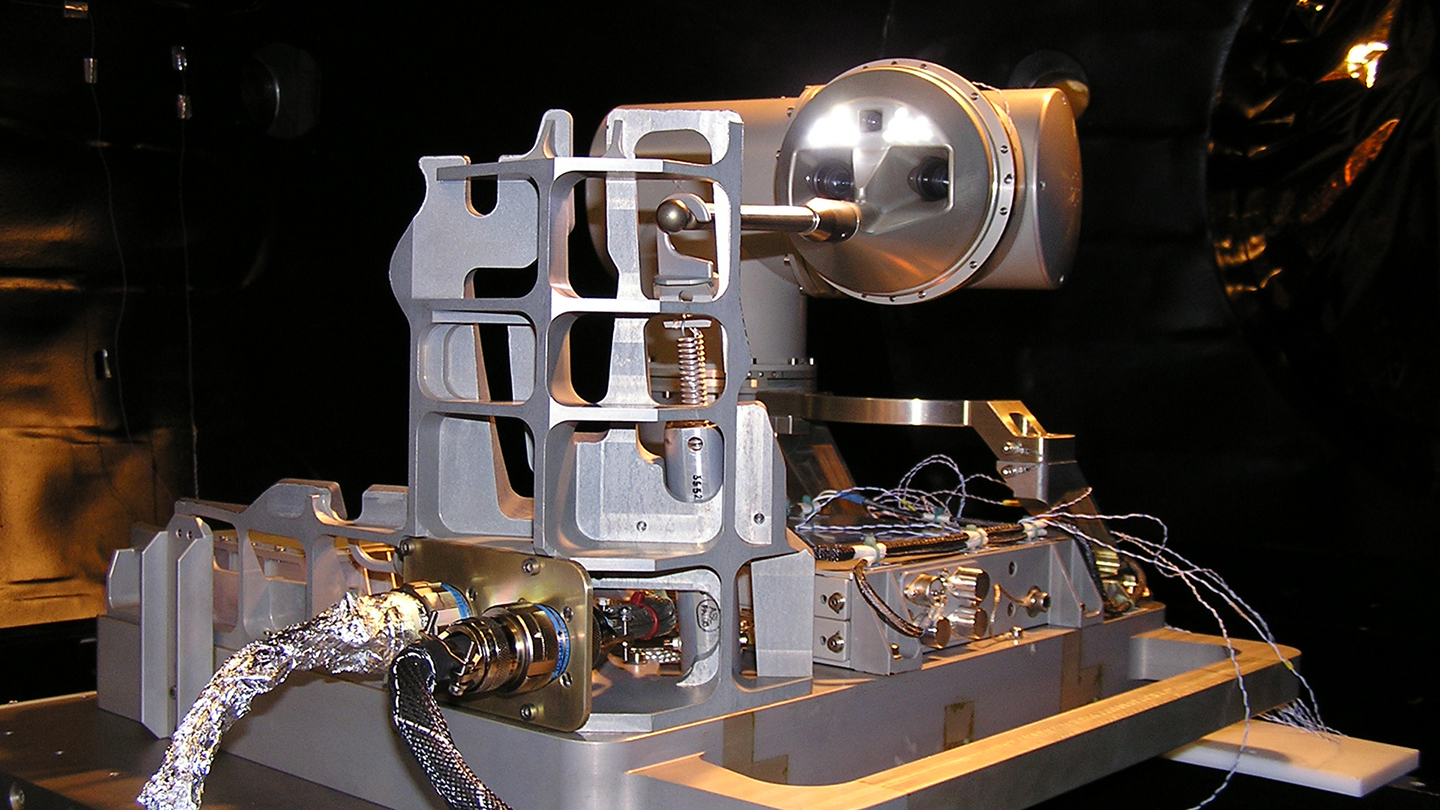
Prinzipiell setzt sich das System aus einem Roboterarm mit zwei Gelenken, einem "Metallfinger" an der Spitze des Arms und einer Stereo-Videokamera sowie einer Mono-Kamera zusammen. Des Weiteren befinden sich auf der Universalplattform Elektronikboxen für die Stromverteilung und Bildverarbeitung sowie eine spezielle Experimentkontur, die für dynamische Bewegungsexperimente des Roboters und für Versuche zur Gelenkparameterbestimmung dient. Die Robotergelenke und die Kameras werden von einem zentralen Experimentcomputer innerhalb der ISS gesteuert.
Der Roboterarm kann in zwei verschiedenen Modi agieren. Der automatische Modus wird in der Phase genutzt, in der es keine Funkverbindung von Bord zum Boden gibt. Hierbei werden die Experimente vom Experimentcomputer an Bord der ISS gesteuert und die Experimentdaten zur späteren Auswertung gespeichert. Für Reparatur- und Wartungsaufgaben an Satelliten ist die direkte Einbeziehung eines menschlichen Operators in den Regelkreis unumgänglich, da solche Missionen offline am Boden nicht im Detail vorbereitet werden konnten. Daher muss ein Tele-Operationsmodus vorgesehen werden, der dem Operator das Gefühl gibt, die Arbeit direkt am entfernten Standort zu erledigen. Insbesondere für den Betrieb in geosynchronen Orbits könnte dieser Tele-Präsenzmodus wegen des unbegrenzten Funkkontakts rund um die Uhr eingesetzt werden. Im Telepräsenz-Modus wird der Roboterarm beim Überflug über die Sende- und Empfangsantenne in Weilheim (Süddeutschland) direkt vom Boden aus ferngesteuert. Erstmals wurde dabei ein Roboter im All ohne wesentliche Zeitverzögerung von der Erde aus gesteuert – ein Novum in der Weltraumrobotik. Der den Roboterarm bedienende Wissenschaftler auf der Erde, bekommt im Gegenzug ebenfalls mit nur minimaler Zeitverzögerung eine optische und sensorische Rückmeldung von den Aktionen des Roboterarms.
Getestet wurde beispielsweise, wie präzise sich der Roboterarm mit einem Joystick mit sogenannter Kraftrückmeldung an der ISS steuern lässt. Dabei spürt der Bediener am Boden die Kraft, mit der der Roboter im Weltraum gegen seine Umgebung drückt. Darüber hinaus untersuchten die Ingenieure auch, welche Energie ROKVISS bei der Bewegung aufnimmt und wie sich die Reibung der Lager und Getriebe über längere Betriebszeiten im freien Weltraum verhält. Die integrierten Kameras dokumentierten die Tests durch Aufnahmen und übertrugen sie in Echtzeit in den Kontrollraum, um den DLR-Wissenschaftlern einen realen Eindruck vom Zustand und der Funktionsweise des Experiments zu vermitteln.
Eine große Herausforderung stellte die radioaktive Strahlung dar, weil durch den häufigen Ionenbeschuss Elektronikbauteile beschädigt werden könnten. Um eine Beschädigung der Elektronikbauteile in den Gelenken zu verhindern, gibt es in deren Modulen ein System, das dafür sorgt, dass im Moment des Kurzschlusses die Stromversorgung automatisch abgeschaltet und die gespeicherte Energie vernichtet wird. Aufgrund der extremen Temperaturschwankungen mussten die Robotergelenke Temperaturen zwischen minus 20 Grad und plus 60 Grad Celsius standhalten.
Ziel des Experimentes war es, neue Roboterhardware und leistungsfähige Steuerungskonzepte im realistischen Missionsbetrieb zu testen und zu verifizieren. Zukünftig soll diese innovative Robotertechnologie Astronauten bei komplizierten Reparatur- oder Montagearbeiten im freien Weltraum unterstützen und entlasten. Zudem könnte es die vom Boden gesteuerte Reparatur von Satelliten ermöglichen. Die zum Einsatz kommenden Komponenten werden die Basis für neue Leichtbau-Robotikelemente bilden, die im Rahmen von zukünftigen bemannten oder unbemannten Raumflugmissionen genutzt werden sollen.
Das erfolgreiche Absolvieren aller geplanten Tests hat das DLR in der Entwicklung von neuartigen Leichtbaurobotern für den kostengünstigen Einsatz im Weltraum und deren komfortabler Fernsteuerung von der Erde einen großen Schritt vorangebracht.
Am 15. November 2010 haben russische Kosmonauten bei einem Außenbordeinsatz den robotischen Arm auf der Internationalen Raumstation demontiert und ins Innere der ISS gebracht. Die Kosten für das Experiment ROKVISS beliefen sich auf 11,5 Millionen Euro einschließlich 3,5 Millionen Euro für Start, Montage und Betrieb auf der ISS.
Künstlerische Darstellung von ROKVISS im Weltraum
ROKVISS wurde für den Einsatz im freien Weltall entwickelt.




{kind=link}
{kind=link}
{kind=link}
{kind=link}