ROKVISS
The robotic arm ROKVISS (RObotics Components Verification on the ISS) was used to test telepresence control concepts as well as the reliability of its highly developed joint electronics. The aim is to build robots in the future that can work on the space station or even in orbits further away.
The system was first put into operation in 2005 on the International Space Station (ISS).
Technical data
| | |
|---|
Size: | 50 cm |
Weight: | 7 kg |
Workspace: | Optimized for use in space |
User interfaces: | Direct remote control via telepresence/automatic mode |
Special features: | • 2 integrated cameras
• 2 joints and a metal finger
• Extremely resistant to high temperature fluctuations
• Space-proven
• System for automatically disconnecting the power supply in case of a short circuit |
System description
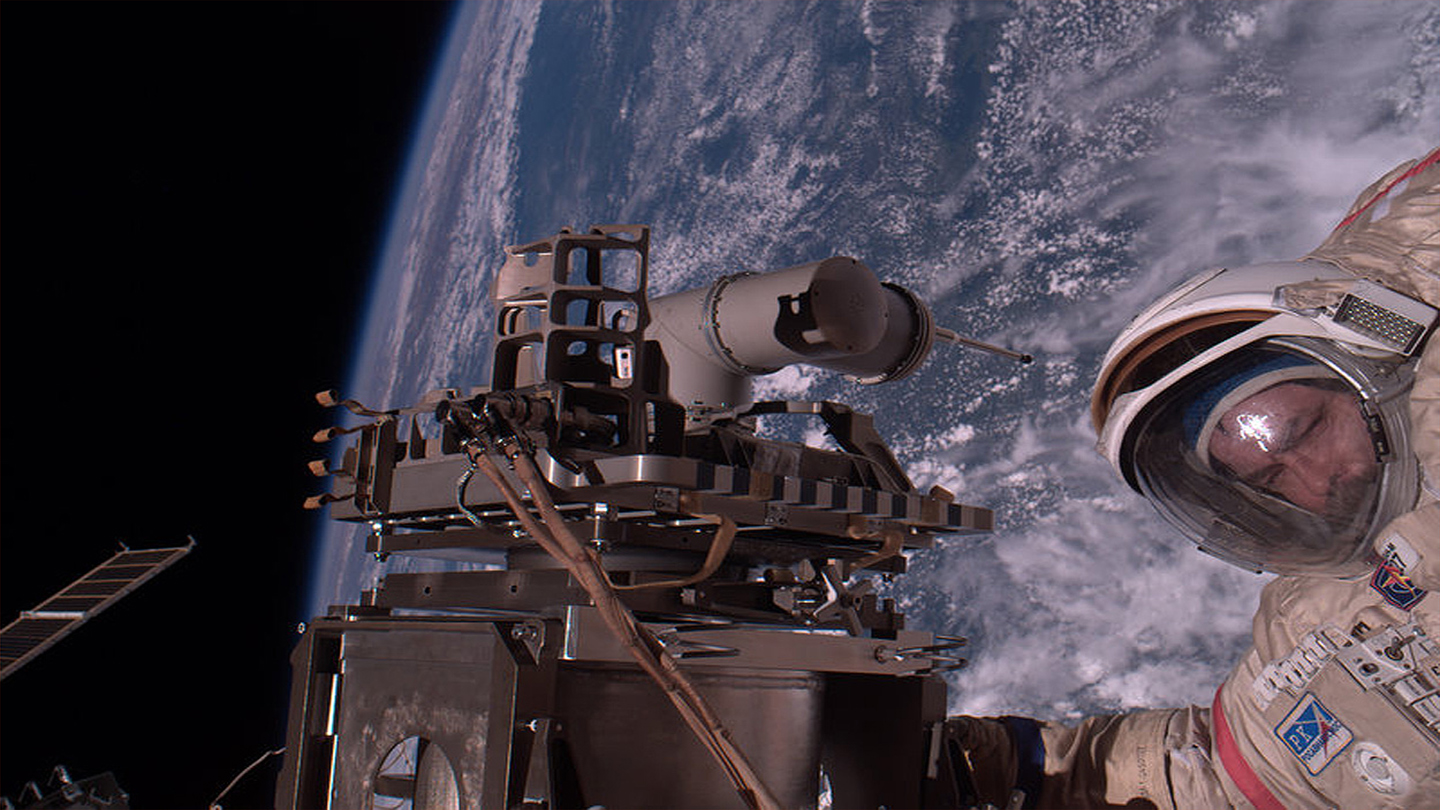
The robotic arm was operated in space for five and a half years (2005–2010) and successfully passed around 500 tests. The system was mounted on the ISS on January 26, 2005 during a six-hour space walk. The astronauts attached a universal platform to the outer wall of Zvezda, the Russian service module, on which ROKVISS was then installed.
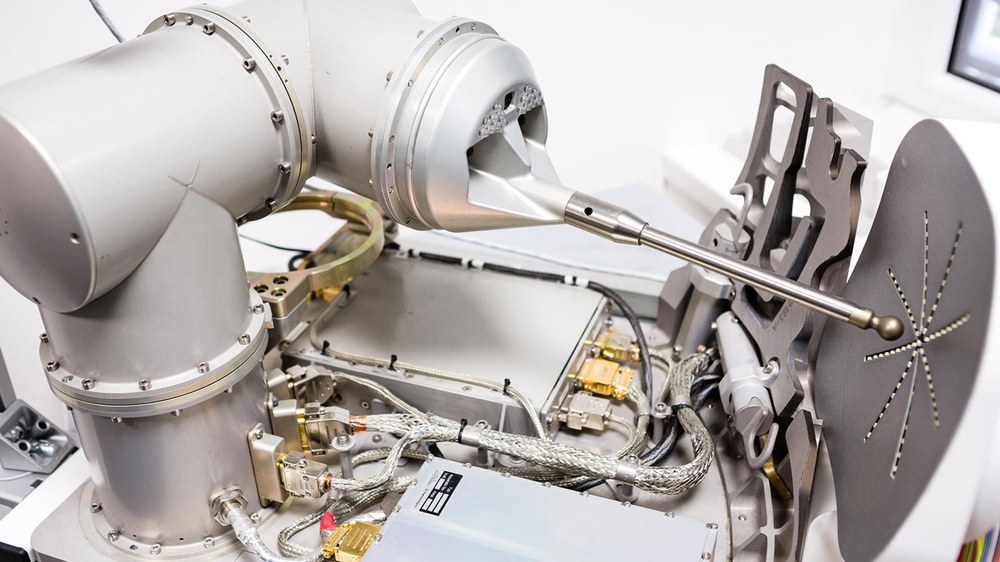
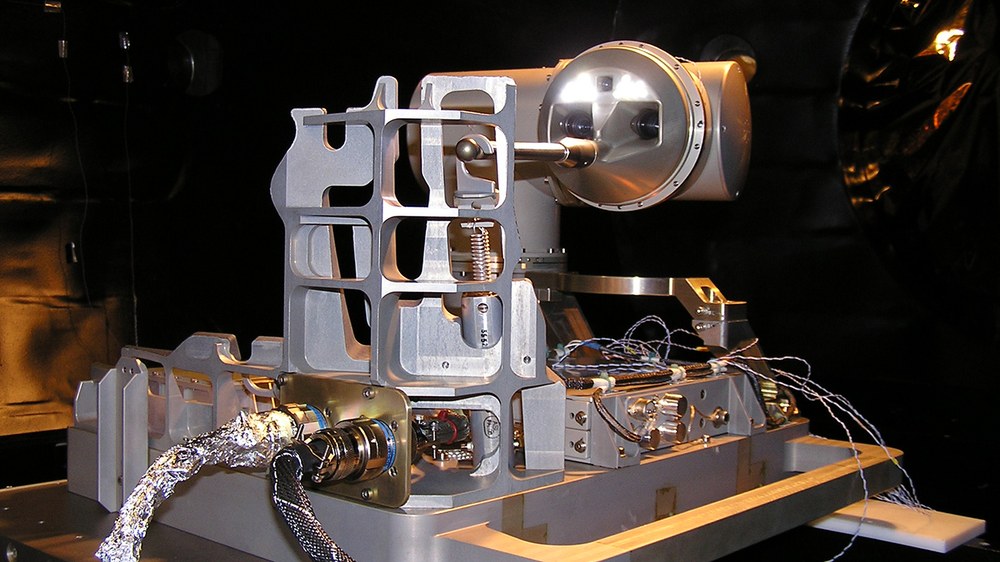
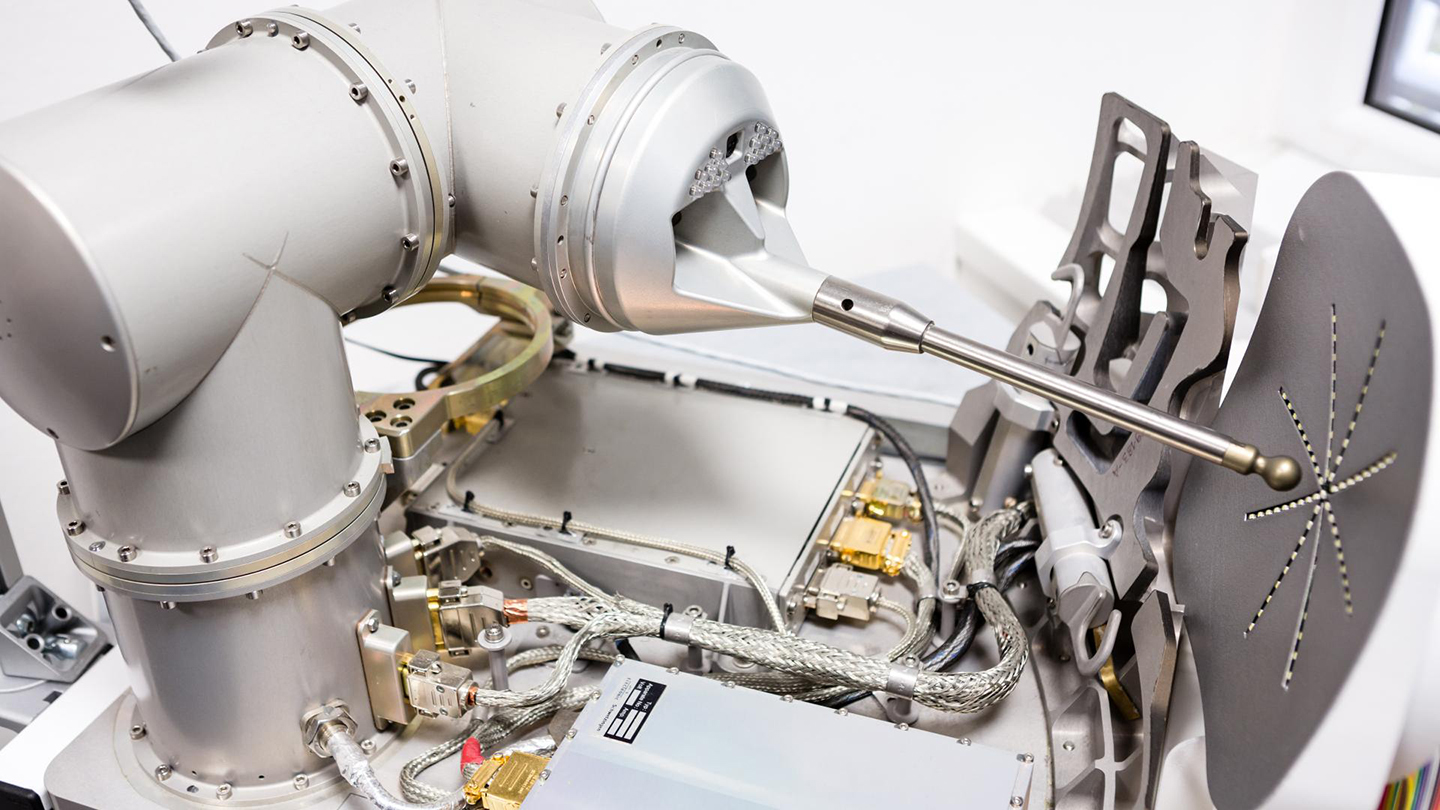
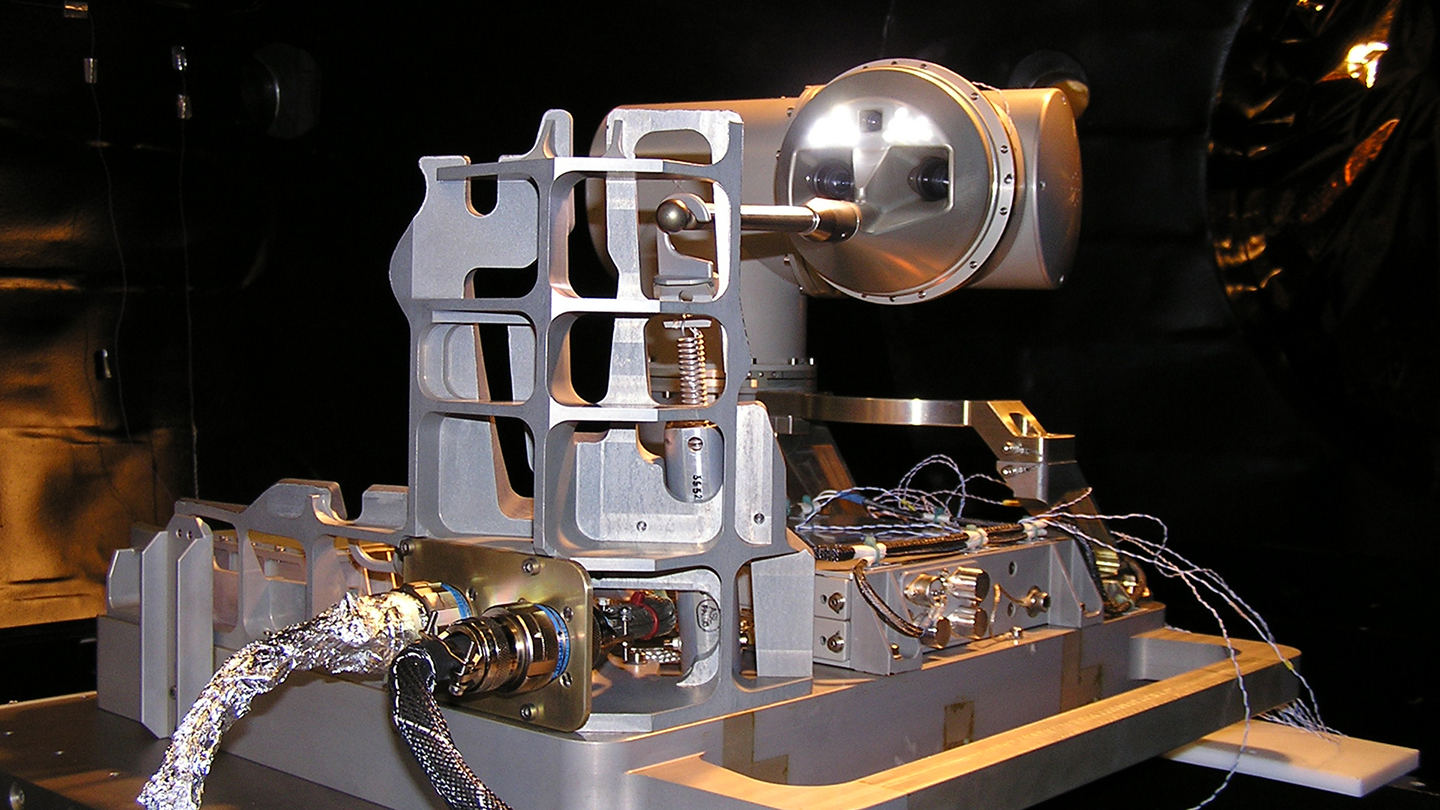
The system basically consists of a robotic arm with two joints, a “metal finger” at the tip of the arm, a stereo video camera and a mono camera. The universal platform also holds boxes with electronics for power distribution and image processing, as well as a special contour used for dynamic robot movement experiments and for experiments to determine joint parameters. The robot joints and the cameras are controlled by a central experiment computer inside the ISS.
The robotic arm can operate in two different modes. Automatic mode is used during phases when there is no radio connection from on board to the ground. The experiments are controlled by the experiment computer on board the ISS and the experiment data are saved for later evaluation. The direct involvement of a human operator in the control loop is essential for repair and maintenance tasks on satellites as such missions could not be prepared in detail offline on the ground. Therefore, a teleoperation mode must be provided, which gives the operator the feeling they are doing the work directly at the remote location. It is possible to use this telepresence mode 24/7, in particular for operation in geosynchronous orbits, due to the unlimited radio contact. In telepresence mode, the robot arm is controlled remotely directly from the ground during the overflight via the transmitting and receiving antenna in Weilheim (southern Germany). For the first time, a robot in space was controlled from earth without any significant time delay – a novelty in space robotics. In reverse, the scientist operating the robot arm on earth receives visual and sensory feedback on the actions of the robot arm with only a minimal time delay.
For example, tests were carried out to determine how precisely the robot arm can be controlled with a joystick using force feedback on the ISS. The operator on the ground feels the force the robot exerts on its environment in space. In addition, the engineers also tested the energy that ROKVISS absorbs during movement and how the friction of the bearings and gears behaves over long periods of operation in space. The integrated cameras documented the tests and transmitted the videos in real time to the control room in order to give DLR scientists a real impression of the state and functionality of the experiment.
Radiation posed a major challenge because the frequent ion bombardment could damage electronic components. To prevent damage to these components in the joints, their modules have an integrated system ensuring that the power supply is automatically switched off at the moment of a short circuit and the stored energy is eliminated. Due to the extreme temperature fluctuations, the robot joints had to withstand temperatures between minus 20 degrees and plus 60 degrees Celsius.
The aim of the experiment was to test and verify new robot hardware and powerful control concepts in realistic mission operations. In the future, this innovative robot technology can support astronauts in complicated repair or assembly work in space. It could also enable ground-controlled repair of satellites. The tested components will form the basis for new lightweight robotic elements that will be used in future manned or unmanned space missions.
After successfully completing all the scheduled tests, DLR has now taken a big step in the development of new types of lightweight robots for cost-effective use in space and their convenient remote control from Earth.
On November 15, 2010, Russian cosmonauts dismantled the robotic arm on the International Space Station during extra-vehicular activity and brought it inside the ISS. The costs for the ROKVISS experiment amounted to 11.5 million euros, including 3.5 million euros for launch, assembly and operation on the ISS.




{kind=link}
{kind=link}
{kind=link}
{kind=link}