
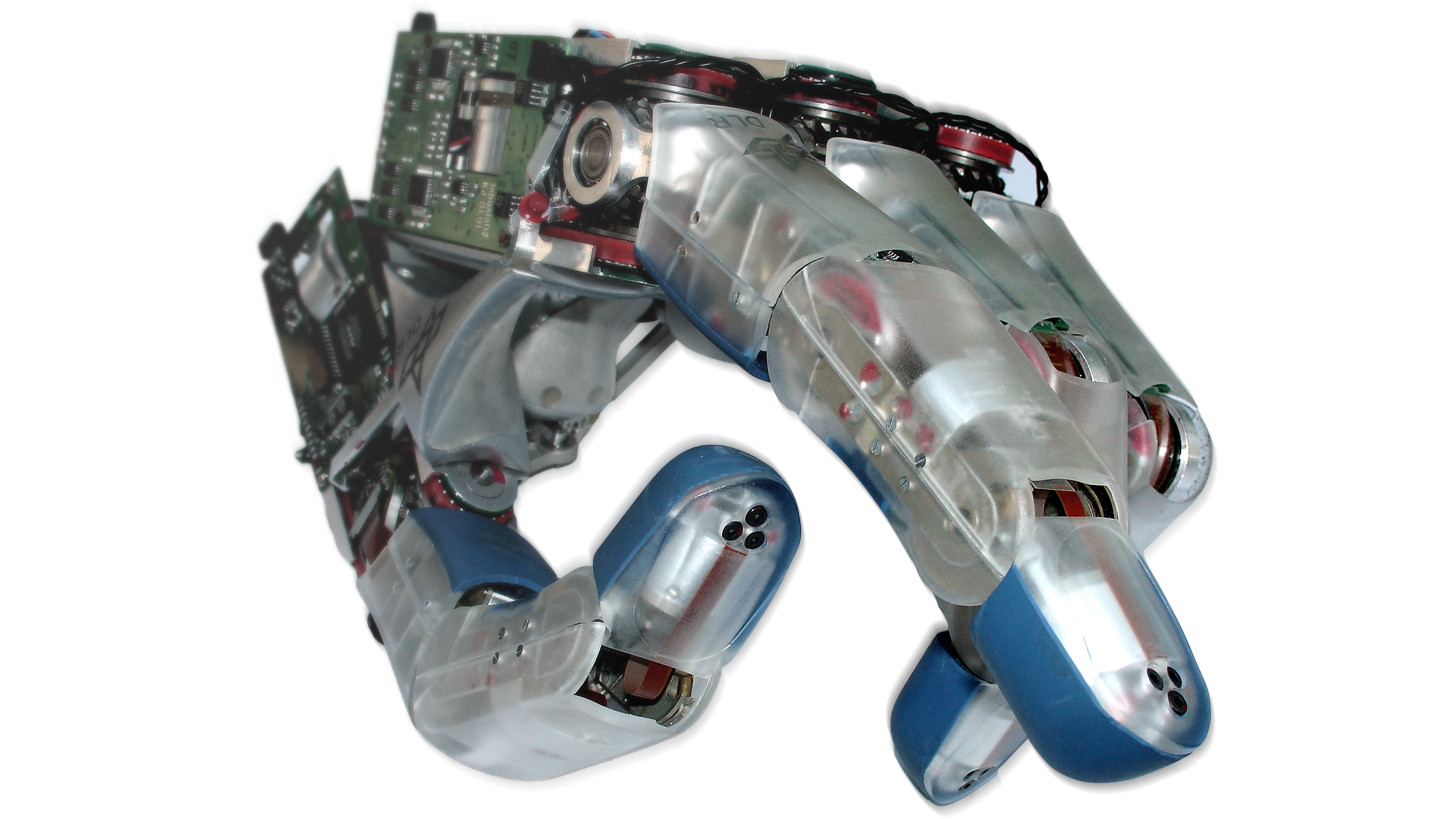
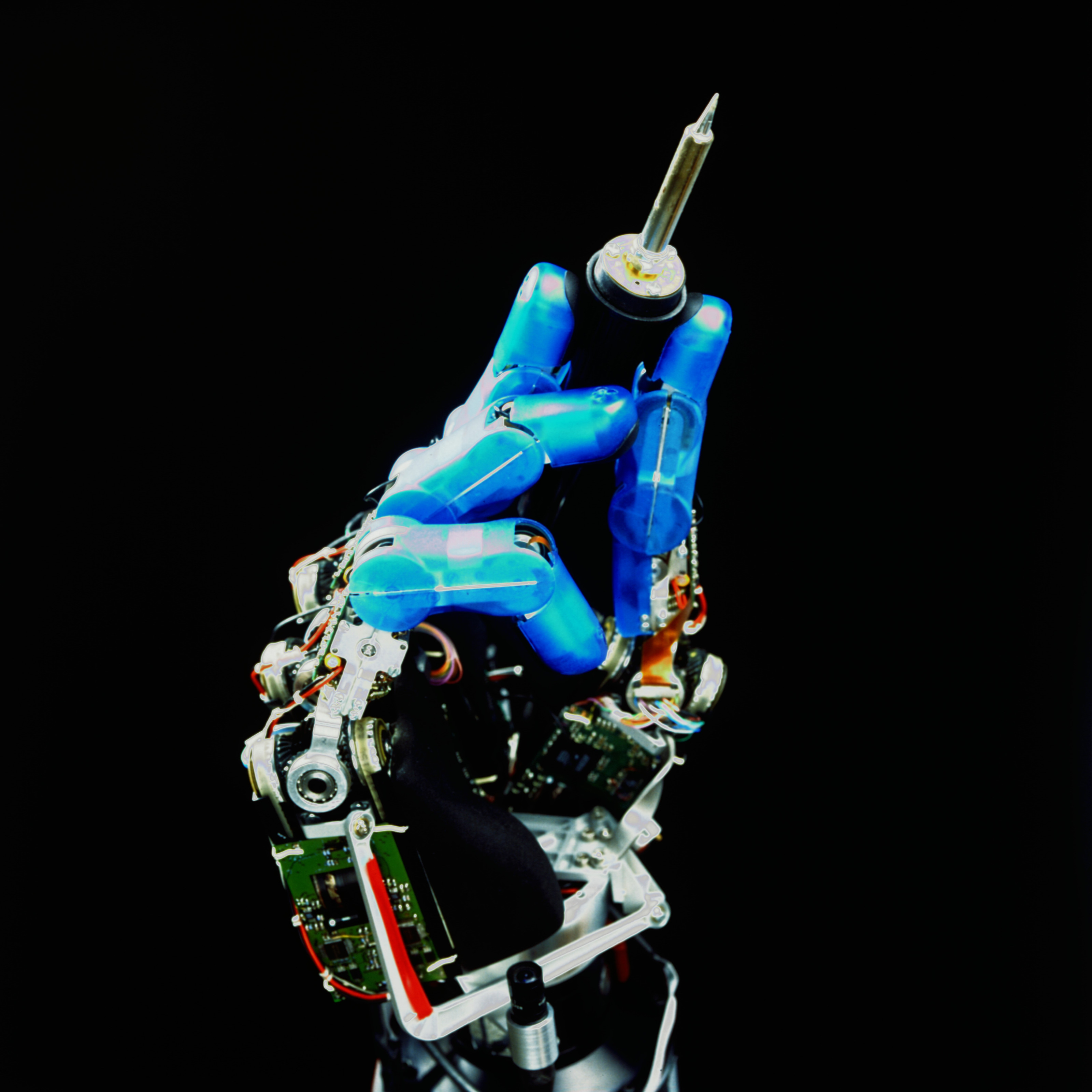
Hand II


Technische Daten
Größe: | 30cm × 15cm × 15cm (ca. 1,5 mal so groß wie die Hand des Konstrukteurs) |
Gewicht: | 1,8kg |
Freiheitsgrade: | 13 mit jeweils 3 pro Finger |
Nominale Nutzlast: | Maximal 30N senkrecht zum ausgestreckten Finger |
Energieversorgung: | 24V Gleichstrom (20A) |
Geschwindigkeit: | 360°/s Gelenkgeschwindigkeit |
Sensorik: |
|
Besonderheiten: |
|









{kind=link}
{kind=link}