
Design/Konstruktion der DLR Hand II


Um das Ziel maximaler Flexibilität und Leistung zu erreichen, ist unsere Philosophie die Miniaturisierung und vollständige Integration aller Komponenten der Hand sowie die massive Reduzierung der Verkabelung. Wie bei der DLR Hand I waren die Hauptaspekte bei der Entwicklung der neuen Hand die maximale Leistung, um die Möglichkeiten des autonomen Greifens und der Feinmanipulation zu verbessern, sowie die Verwendung von vollständig integrierten Aktoren und Elektronik ohne Unterarm. Dies ist die einzige Möglichkeit, eine gelenkige Hand mit verschiedenen Robotertypen zu verwenden, die nicht speziell für den Einsatz mit Händen gedacht sind. Hände mit Unterarm oder Hände, die nur greifen können, ermöglichen ein viel kleineres und damit anthropomorpheres Design, da der zusätzliche Platz im Unterarm für Aktuatoren und elektronische Komponenten genutzt werden kann, schränken aber die Verwendbarkeit z.B. bei Industrierobotern ein. Eine weitergehende Verschiebung dieser Komponenten, wie sie von der MIT-Utah Hand bekannt ist, macht die Verwendung auf mobilen Robotern nahezu unmöglich. Außerdem muss die Hand einfach zu warten und zu benutzen sein und im Falle einer Beschädigung durch den täglichen Forschungseinsatz sogar kostengünstig wiederhergestellt werden können.
Offenes Skelett-Design
Aufgrund von Wartungsproblemen bei Hand I und um Gewicht und Produktionskosten zu reduzieren, wurden die Finger und Grundgelenke von Hand II als offene Skelettstruktur realisiert. Die offene Struktur wird von 4 Halbschalen und einem 2-Komponenten-Gehäuse für die Fingerspitzen bedeckt, die in Stereolithographie und Vakuumform hergestellt wurden. Dies ermöglicht es uns, den Einfluss verschiedener Formen der Außenflächen auf die Greifaufgaben zu testen, ohne die Fingerteile neu gestalten zu müssen.
Kinematischer Entwurf der DLR-Hand II
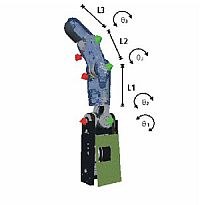
Der Designprozess begann auf anthropomophischer Basis mit der Evaluierung verschiedener Maße für den Arbeitsbereich und die Manipulierbarkeit, um ein optimales Verhältnis der Gliederlängen eines Fingers zu erhalten. Die gewünschten zu manipulierenden Objekte und die technologischen Einschränkungen führten zu absoluten Gliederlängen. Der zweite Schritt bestand darin, eine geeignete Handkinematik zu finden. Das Hauptziel bei der Entwicklung der Hand II war neben der Fähigkeit zur Feinmanipulation die Verbesserung der Greifleistung beim Präzisions- und Kraftgriff. Daher basierte das Design der Hand II auf Leistungstests mit skalierbaren virtuellen Modellen. Bald stellte sich heraus, dass es sehr wichtig ist, auch die Position des 4. Fingers und des Daumens verändern zu können. Für kraftvolles Greifen ist es absolut notwendig, dass der zweite, dritte und vierte Finger nahezu parallel zueinander stehen. Andererseits sind für Präzisionsgriffe und feine Manipulationen große Überschneidungsbereiche der Bewegungsbereiche und die Opposition von Daumen und Ringfinger erforderlich. Daher wurde die Hand II mit einem zusätzlichen kleinen Freiheitsgrad ausgestattet, der es ermöglicht, die Hand in 2 verschiedenen Konfigurationen zu verwenden. Dieser Freiheitsgrad ist ein Slow-Motion-Typ, um Gewicht und Komplexität des Systems zu reduzieren. Die Bewegungen des ersten und des vierten Fingers werden beide mit nur einem bürstenbehafteten Gleichstrommotor über ein Spindelgetriebe realisiert. Die realisierten Fingerpositionen für beide Arten des Greifens wurden virtuell entworfen und anhand der Positionen des 2. und 3. Die realisierbaren Kinematiken wurden berechnet und in die beiden virtuell gefundenen Konfigurationen importiert und optimiert, bis die tatsächliche Konfiguration mit einer Gesamtzahl von 13 DOF gefunden war.
Aktuator System
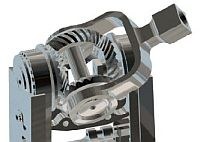
Die drei unabhängigen Gelenke (es gibt ein zusätzliches gekoppeltes Gelenk) jedes Fingers sind mit entsprechenden Aktuatoren ausgestattet. Die Antriebssysteme bestehen im Wesentlichen aus bürstenlosen Gleichstrommotoren, Zahnriemen, harmonischen Antriebsrädern und Kegelrädern im Grundgelenk. Die Konfiguration unterscheidet sich zwischen den verschiedenen Gelenken. Das Basisgelenk mit seinen zwei Freiheitsgraden ist ein Differentialkegelradgetriebe, wobei die harmonischen Antriebszahnräder aus geometrischen Gründen direkt mit den Motoren gekoppelt sind. Der Differentialgelenktyp ermöglicht es, die volle Kraft der beiden Aktuatoren für die Beugung oder Streckung zu nutzen. Da dies die Bewegung ist, bei der der größte Teil des verfügbaren Drehmoments aufgebracht werden muss, kann das Drehmoment der beiden Aktuatoren die meiste Zeit gemeinsam genutzt werden. Das bedeutet, dass wir kleinere Motoren verwenden können. Das Antriebssystem im medialen Gelenk ist so konzipiert, dass es den Bedingungen im Grundgelenk entspricht, wenn sich der Finger in gestreckter Position befindet, und kann eine Kraft von bis zu 30 N auf die Fingerspitze ausüben. Hier ist der Motor mit dem Getriebe durch einen Treibriemen verbunden. Der Motor im Mittelgelenk hat eine geringere Leistung als die Motoren im Grundgelenk, allerdings gibt es eine zusätzliche Untersetzung von 2:1 durch den Transmissionsriemen. So erreichen wir das Drehmoment, das dem Drehmoment entspricht, das die beiden Motoren im Grundgelenk bei einer äußeren Kraft von 30 N auf die Fingerspitze erzeugen. Die verwendeten harmonischen Antriebe sind für alle Gelenke vom gleichen Typ, da der kleinste geeignete Typ das Drehmoment für beide Arten von Aktuatoren aushalten kann.
Sensor Equipment
Eine geschickte Roboterhand für die Teleoperation und den autonomen Betrieb benötigt als Minimum eine Reihe von Kraft- und Positionssensoren. Verschiedene andere Sensoren ergänzen dieses Grundschema. Jedes Gelenk ist mit Dehnungsmessstreifen-basierten Drehmomentsensoren und speziell entwickelten Potentiometern aus leitfähigem Kunststoff ausgestattet. Neben den Drehmomentsensoren in jedem Gelenk haben wir einen winzigen sechsdimensionalen Kraft-Drehmoment-Sensor für jede Fingerspitze entwickelt. Die Potentiometer, jedes mit einem analogen Filter dritter Ordnung, wären nicht unbedingt notwendig, da man die Gelenkposition aus der Motorposition berechnen kann, aber sie liefern uns eine genauere Information über die Gelenkposition und sie können übrigens die Notwendigkeit beseitigen, die Finger nach dem Einschalten zu referenzieren. Wenn man die Potentiometer nicht verwenden würde, müsste man die Elastizität des Antriebsriemens und des Oberwellenantriebs berücksichtigen. Mit dem Potentiometer erreichen wir eine Auflösung für die Gelenkwinkel von 1/10 Grad, d.h. etwa 10 Bit für das Gelenk .
Da das Basisgelenk ein Differentialgelenk ist, muss man die Gelenkposition des Basisgelenks aus den Potentiometerwerten berechnen. Aus Platzgründen gab es keine Möglichkeit, die Gelenkposition direkt zu messen. Um die Kontrollierbarkeit der Aktuatoren zu erhöhen, schätzen wir Geschwindigkeitssensoren. Wie in der ersten Generation der DLR-Hand verwenden wir so genannte Tracking Converters. Im Gegensatz zur alten Version wird die gesamte Berechnung per Software durchgeführt, da jetzt genügend Rechenleistung zur Verfügung steht. Der Sensor selbst ist im Grunde ein Positionssensor mit sehr hoher Auflösung, bei dem die Geschwindigkeit durch Differenzierung des Positionssignals berechnet werden kann. Jeder Motor ist mit zwei linearen Hall-Effekt-Sensoren ausgestattet, die auch für die Kommutierung der Motoren verwendet werden. Diese Sensoren liefern zwei sinusförmige Signale mit einer Phasenverschiebung von 120 Grad. Die Position innerhalb des magnetischen Zyklus des Motors wird aus diesen Signalen berechnet. Durch zusätzliches Zählen der Zyklen kann die Position berechnet werden. Diese Art von Sensor liefert uns nur eine relative Position des Motors und muss daher nach dem Einschalten referenziert werden.
Integrierte Elektronik
Ein Hauptziel bei der Entwicklung der neuen DLR Hand war die vollständige Integration der benötigten Elektronik in den Fingern und der Handfläche, um die Anzahl der für eine multisensorische Hand benötigten Kabel zu minimieren und die Zuverlässigkeit zu erhöhen, indem die Anzahl der über die Gelenke verlegten Kabel minimiert wird. Durch dieses Design erhalten wir eine Hand, die frei mit verschiedenen Roboterarmen kombiniert werden kann. Bei Gelenken mit einem einzigen Freiheitsgrad haben wir das Problem der Zuverlässigkeit gelöst, indem wir flexible Leiterplatten (PCB) mit entsprechendem Biegeraum innerhalb der Gelenke verwendet haben. Tests zeigten nach 100.000 Zyklen keine sichtbaren oder messbaren Auswirkungen auf die flexible Leiterplatte. In jeder Verbindung wandelt mindestens ein serieller ADC mit 8 Kanälen und 12 Bit Auflösung die Sensorsignale so nah wie möglich an den Sensorschaltkreisen in digitale Daten um. Somit überqueren nur digitale Daten ein beliebiges Gelenk des Fingers. Die Leistungswandler für den Antrieb der Motoren befinden sich direkt neben den Motoren und sind galvanisch von der Sensorelektronik entkoppelt, um das durch die laufenden Motoren verursachte Rauschen zu minimieren. Außerdem sind die verschiedenen Finger auch untereinander galvanisch entkoppelt.
Kommunikationsarchitektur

Die Steuerung der Finger und der Hand erfolgt über einen externen Computer. Um die Hand frei an verschiedenen Manipulatoren einsetzen zu können und um Kabel und die Möglichkeit von Rauschen in den Sensorsignalen zu reduzieren, haben wir uns entschieden, ein vollständig integriertes serielles Kommunikationssystem zu entwickeln. Jeder Finger enthält einen Kommunikationscontroller in seiner Basiseinheit. Dieser Controller ist für die Sammlung und Verteilung aller wichtigen Informationen innerhalb des Fingers verantwortlich. Außerdem führt er eine vernünftige Signalverarbeitung durch. Er sammelt die Daten aller fünf ADCs pro Finger mit zusammen 40 Kanälen von je 12 Bit Auflösung und überträgt diese Daten an den Kommunikationscontroller in der Handbasis. Andererseits verteilt er die Daten aus dem Kontrollschema an die Aktoren zur Fingersteuerung. Der Kommunikationscontroller in der Handbasis verbindet den seriellen Datenstrom jedes Fingers mit dem Datenstrom des externen Steuercomputers. Durch diese Hardware-Architektur sind wir in der Lage, die Anzahl der externen Kabel der DLR Hand II auf eine vieradrige Stromversorgung und eine achtadrige Kommunikationsschnittstelle zu beschränken, da die Daten über Differenzleitungen übertragen werden. Diese Schnittstelle bietet sogar die Möglichkeit, eine Quick-Lock-Werkzeugaufnahme für den autonomen Werkzeugwechsel zu verwenden. Die Reduzierung der externen Verkabelung von 400 (in Hand I) auf 12 ist einer der größten Fortschritte in unserer neuen Hand.
Downloads
- Dexterous Robot Hand (615.2 KB)