Integrierte Elektronik Kein externes Rack Interne Verkabelung
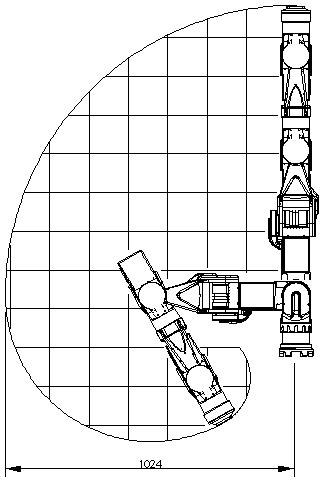
Gelenkwinkelraum
Achse
Bewegungsraum
1
± 170°
2
± 100°
3
± 120°
4
± 130°
5
± 170°
6
± 130°
7
± 170°
Der erstmals auf der Hannovermesse 2000 präsentierte DLR Leichtbauroboter II bot ein bis dahin unerreichtes Verhältnis von Nutzlast zu Gesamtgewicht. Er konnte eine Nutzlast von 7 kg bei voller Geschwindigkeit manipulieren, wobei sein Eigengewicht lediglich 18 kg betrug.
Diese extreme Leichtbaukonstruktion wurde möglich, indem alle kritischen Komponenten mittels Finiter Elemente Methoden optimiert wurden. Zudem wurden sehr leichte Getriebe, leistungsstarke Motoren und gewichtsoptimierte Bremsen in den Roboter integriert.
Ähnlich wie der menschliche Arm besaß der LBR II sieben Freiheitsgrade. Diese kinematische Redundanz erhöhte verglichen mit Standardindustrierobotern die Flexibilität des Systems.
Alle elektronischen Systeme einschließlich der Leistungselektroniken wurden in den Roboterarm integriert. Dadurch benötigte der LBR II anders als die meisten Industrieroboter kein externes Elektronikrack.
Die integrierte Sensorik war für die damalige Zeit sehr fortschrittlich: Jedes LBR-II-Gelenk besaß einen motorseitigen Positionssensor sowie Gelenkwinkel- und Drehmomentsensoren. Dadurch konnte der Roboter positions-, geschwindigkeits- und drehmomentgeregelt betrieben werden, was in einem sehr dynamischen System mit Schwingungsdämpfung resultierte.
Die Kommunikation zwischen den Einzelgelenken erfolgte über ein faseroptisches Bussystem. Die Gelenkelektroniken wurden galvanisch isoliert versorgt. Der gesamte Kabelstrang, bestehend aus einem faseroptischen Kabel, Stromversorgung und Notaus-Schaltkreis, befand sich innerhalb des Roboterarms.


{kind=link}
