
LBR I (1991–1996)

{kind=link}
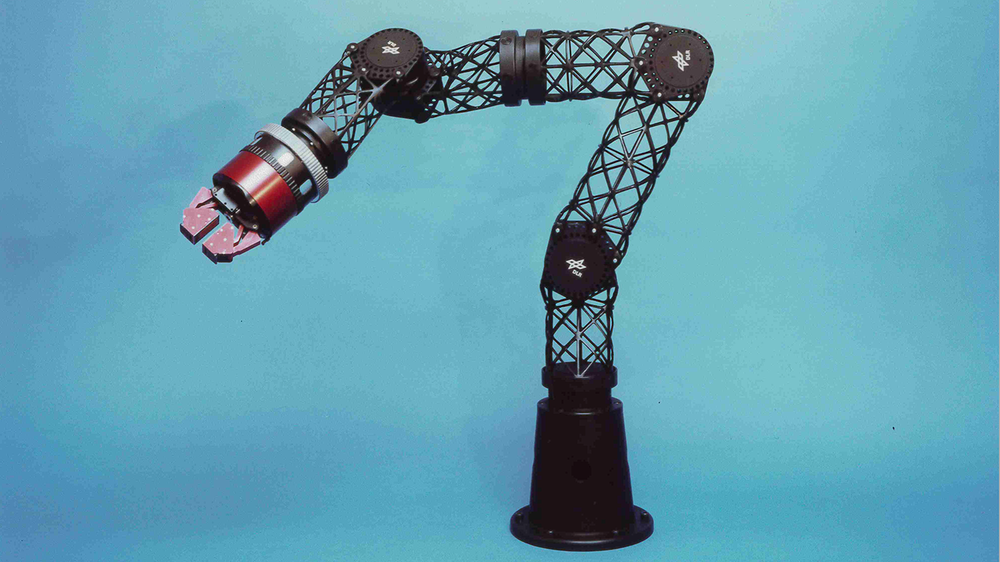
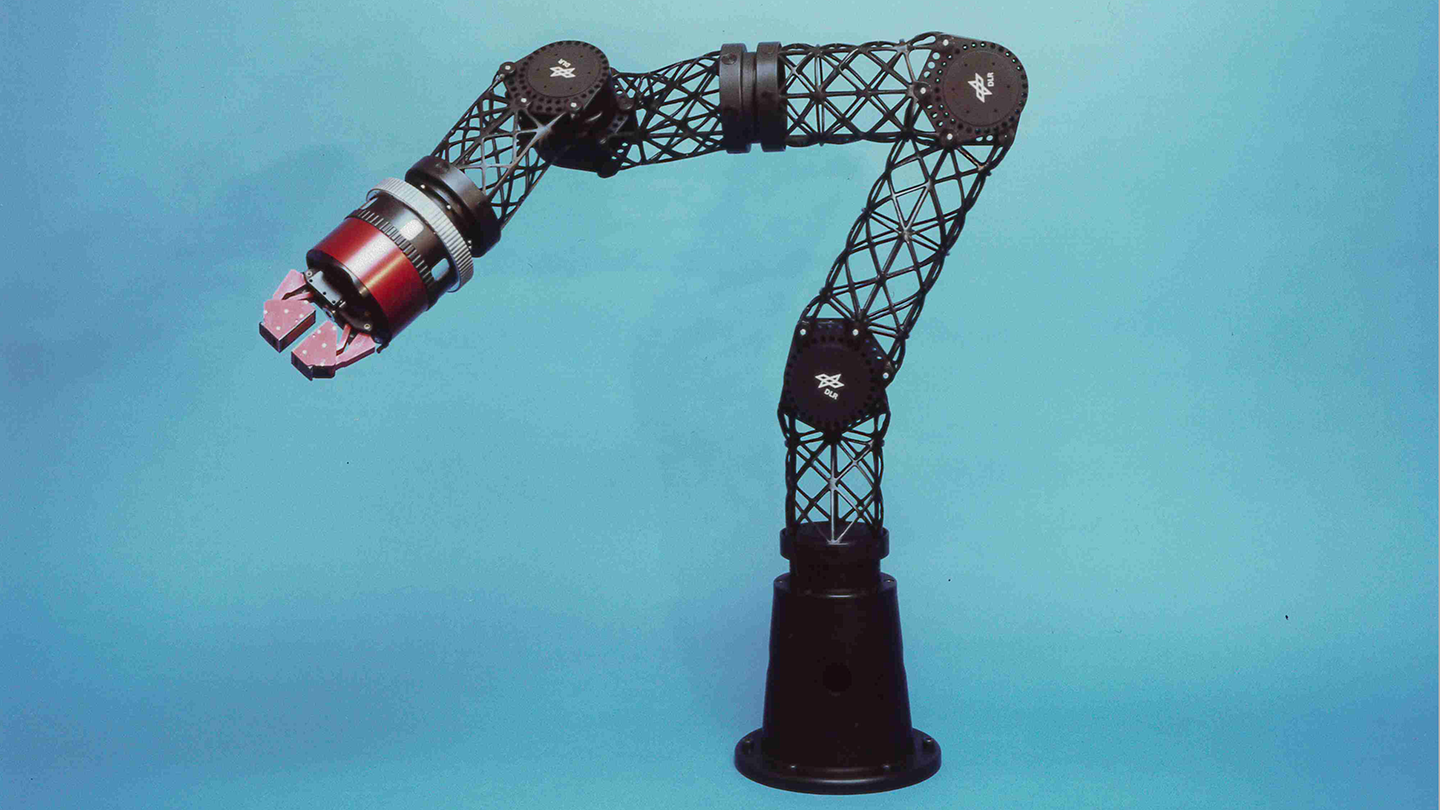
Der LBR I war der erste Leichtbauroboter des Instituts für Robotik und Mechatronik. Durch sein geringes Gewicht und die in den Gelenken integrierten Drehmomentsensoren konnten mit diesem Roboter die zukünftigen Anwendungsmöglichkeiten von Cobots im Bereich der Montage und der Menschen-Roboter-Kollaboration untersucht werden. Der LBR I wurde 1995 fertiggestellt.
Technische Daten
Gesamtgewicht | 14,5 kg |
Max. Nutzlast | 7 kg |
Max. Gelenkgeschwindigkeit | 120 °/s |
Achsen | 7 (R-P-R-P-R-P-R) |
Gesamtlänge | 1338 mm |
Motoren | Schrittmotoren Escap |
Getriebe | DLR Planetengetriebe |
Sensoren (je Gelenk) | 1 inkrementeller Positionssensor, 1 Drehmomentsensor |
Bremsen | Selbstsperrendes Getriebe |
Energieversorgung | 50V 20 kHz AC-Bus |
Regelung | Position-, Drehmoment-, Impedanzregelung; Kontrollzyklen: Spannung 40 kHz, Gelenk 2 kHz, Kartesisch 1 kHz |
Elektronik | Integrierte Elektronik, externe Verkabelung, Kommunikation durch optischen SERCOS-Bus |
Systembeschreibung
Am Institut für Robotik und Mechatronik wurde für das Weltraumroboter-Experiment ROTEX der D2-Mission (STS-55 vom 26.04. bis zum 06.05.1993) in Kooperation mit Dornier das erste im Weltraum eingesetzte telemanipulierte Robotersystem entwickelt (1986–1993). Es demonstrierte in beeindruckender Weise, dass die Steuerung eines Weltraumroboters von der Erde aus möglich war. Die auftretenden Umlaufverzögerungen von bis zu sieben Sekunden wurden mittels On-Board-Autonomie kompensiert. Diese Autonomie wurde mit Hilfe des multisensoriellen ROTEX-Greifers erzielt. Der bei der Mission verwendete Roboterarm war nicht in der Lage, auf der Erde sein eigenes Gewicht zu tragen.
Für das Training der Astronauten wurde aber ein leichter und flexibler Roboter benötigt: Die Idee für den ersten Leichtbauroboter (LBR I) war geboren. In der ersten Bauweise verfügte der Arm über 6 Gelenke und war dem Flugmodell des Roboters im Experiment ROTEX ähnlich. Später wurde ein siebtes Rotations-Gelenk zwischen Achse 2 und 3 eingefügt und der Roboter dadurch mit einem redundanten Freiheitsgrad versehen. Die Kinematik des Roboters ähnelte der des menschlichen Arms, jedes Gelenk war mit einem Drehmomentsensor ausgestattet, die gesamte Elektronik wurde in den Roboterarm integriert und wo immer möglich wurde das Gewicht reduziert.
Der LBR I besaß bereits viele Merkmale der späteren DLR Leichtbauroboter, die mit dem LBR I zum ersten Mal in einem Roboterarm vereint wurden:
- Leichtbau
Die Gelenke bestanden bis auf die Zahnräder des Getriebes aus Aluminium. Die Strukturelemente sind gewickelte Gitterstrukturen aus Carbonfaser. - Angepasste Antriebstechnik
Es wurden selbst entwickelte, hochuntersetzende und kompakte Planetengetriebe mit extrem kleinen Schrittmotoren mit hoher Dynamik und geringem Gewicht kombiniert. - Dezentrale Elektronik
Jede Achse hatte in die Struktur integriert ein lokales Leistungsteil basierend auf MOSFETs und einen Rechnerknoten mit Sensorinterface bestehend aus zwei Mikroprozessoren. - Echtzeitfähige Buskommunikation
Die sieben Gelenkeinheiten kommunizierten per SERCOS-Schnittstelle mit einer Periode von 1 ms mit dem Steuerrechner. - Schnelle und hochauflösende Antriebs-Sensorik
Mit analogen Hall-Elementen und einem digitalen Algorithmus auf EPLD-Basis (Tracking-Converter) wurde im 20kHz-Takt der Leistungselektronik die Motorposition erfasst. - Galvanische Trennung der dezentralen Sensorknoten
Durch eine Versorgung mit 20kHz-Rechteckspannung wurden alle Spannungslevel der jeweiligen Gelenk-Elektroniken mittels kleiner Ringkerntransformatoren lokal erzeugt. - Hochauflösende induktive Drehmoment-Sensorik am Getriebeabgang
Mit Hilfe zweier induktiver Sensoren (LVDTs) wurde die Verbiegung eines Speichenrades in der Drehachse des Abgangsflansches mit einer Auflösung von 14 Bit gemessen. - Aktive Schwingungsdämpfung auf Gelenkebene
Basierend auf der Messung des Drehmomentes am Abgang wurde die Motorposition so geregelt, dass auftretende Schwingungen aktiv gedämpft wurden. Dies war der Vorläufer der heutigen Gelenk-Zustandsregelung. - Drehzahlabhängige Feldvektorsteuerung
Um die notwendige Drehzahl mit den Schrittmotoren zu erreichen, wurde zeitbasiert mittels Logikschaltungen die Steuerspannung adaptiert. Damit konnten Drehzahlen bis 12.000 U/min in wenigen Millisekunden angefahren werden. Dies war der Vorläufer heutiger FOC-Verfahren (Field-Oriented-Control). - Iterative Verfahren zur Redundanz-Auflösung
Während bei 6 Achsen mittels Matrix-Inversion die Gelenkwinkel zur Verfolgung einer kartesischen Trajektorie bestimmt wurden, konnte mit iterativen Verfahren, basierend auf der transponierten Jacobi-Matrix, eine Gelenkkonfiguration für 7 Achsen in Echtzeit gerechnet werden.


{kind=link}
Während alle Verfahren weiterverfolgt wurden und heute in unterschiedlicher Realisierung in vielen industriellen Robotern und Cobots zum Standard gehören, war die reale Güte der Bewegung ziemlich limitiert. Aufgrund stark schwankender Reibung in den Getrieben neigte der Roboter zu deutlich sichtbaren Schwingungen und auch die Laufgeräusche waren ziemlich unangenehm. Insbesondere deshalb konnten höhere Dynamiken im Gesamtsystem, wie sie zum Beispiel bei kartesischer Kraftregelung im Kontaktfall auftreten, nur angenähert und langsam dargestellt werden. Dennoch war bereits mit diesem System erkennbar, wie extrem schnelle Gelenkregelung in Verbindung mit hochauflösender Sensorik und schneller Systemkommunikation zukünftige Einsatzfälle im Bereich der Montage und der Mensch-Roboter-Kollaboration ermöglichen würden. Auch der Vorteil der kinematischen Redundanz mit deutlich harmonischeren und effizienteren Bewegungsmustern war zum ersten Mal sichtbar.
Veröffentlichungen
- J. Dietrich, G. Hirzinger, B. Gombert, J. Schott, "On a unified concept for a new generation of light-weight robots" in Experimental Robotics I, Springer, 1990
- G. Hirzinger, A. Baader, R. Koeppe, M. Schedl, "Towards a New Generation of Multisensory Light-weight Robots with Learning Capabilities" in IFAC 12th Triennial World Congress, Sydney, Australien, Juli 1993
- B. Gombert, G. Hirzinger, G. Plank, M. Schedl, J. Shi, "Modular concepts for the new generation of DLR's light weight robots" in Proceedings of the Third Conference on Mechatronics and Robotics, Paderborn, Okt. 1995