
ROTEX (1988–1993)
Robot Technology Experiment auf Spacelab D2-Mission (ROTEX)
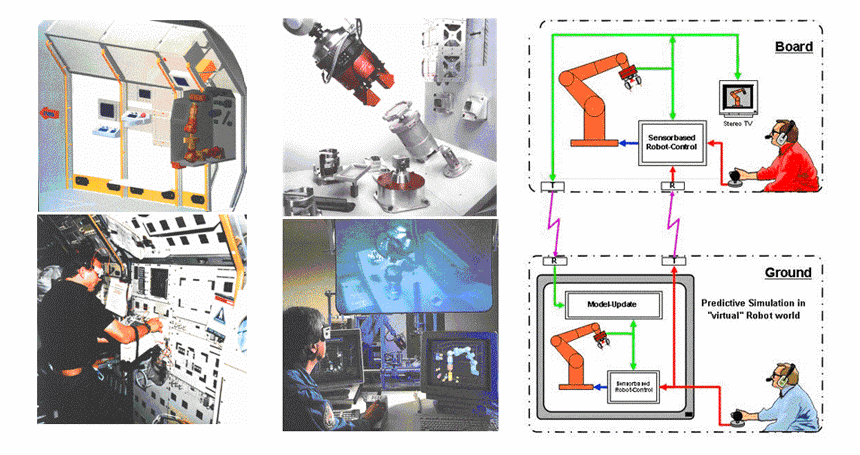
ROTEX war quasi der Startschuss für Deutschlands Teilhabe an der Weltraumautomation und ‑robotik. Zum einen wurde der Schwerpunkt auf größtmögliche Autonomie durch bordeigene Sensorik gelegt und andererseits wurde angenommen, dass eine auf leistungsstarke Telerobotikstrukturen basierende Mensch-Maschine-Kooperation für viele Jahre die Grundlage für leistungsfähige und bodengeführte Raumfahrtrobotiksysteme bilden würde. So wurde bei ROTEX versucht, eine Vielzahl an Betriebsarten vorzubereiten, wie zum Beispiel die bord- und bodengestützte Telemanipulation sowie die Fernprogrammierung von Sensoren vom Boden aus. Dazu gehörte allerdings nicht der perfekt intelligente Roboter, der ohne menschlichen ‚Mentor‘ auskommt. Das Experiment diente darüber hinaus zur Vorbereitung verschiedener Anwendungen im Hinblick auf Montage und externe Instandhaltung. ROTEX war Teil der Spacelab-Mission D2 im Jahr 1993 und führte mehrere prototypartige Aufgaben durch, z. B. den Zusammenbau einer Gitterkonstruktion und das Einfangen eines frei schwebenden Objekts. Das alles erfolgte in verschiedenen Betriebsarten, wie z. B. offline programmiert aber auch online fernbedient durch einen Menschen auf der Erde und maschinelle Intelligenz.

{kind=link}
Hauptbestandteile des Experiments:

- Ein kleiner 6-Achsen-Roboter wurde in ein Spacelab-Gestell eingebaut.
- Der Roboter ist mit einer gemeinsamen Autonomie ausgestattet.
Sein Greifer, der bis dahin wahrscheinlich komplexeste multisensorische Greifer, wurde mit diversen Sensoren versehen:
- insbesondere 2 6-achsige Kraft-Momenten-Sensoren im Handgelenk (ein steifer DMS-artiger und ein eher nachgiebiger optischer Sensor)
- Tastbereiche,
- Greifkraftregelung,
- eine 9er-Gruppe Laserentfernungsmesser, und ein winziges paar Stereokameras, die ein Stereobild aus dem Greifer heraus liefern.
- Zusätzlich hat ein fest verbautes Paar Stereokameras den Arbeitsbereich des Roboters aufgenommen.
Zum Nachweis der Instandhaltungsfähigkeiten des Prototypen wurden drei grundlegende Aufgaben durchgeführt:
- Zusammenbauen einer Gitterkonstruktion
- Verbinden/Trennen einer im Orbit austauschbaren Komponente (Orbital-Replaceable-Unit, ORU) mithilfe eines Bajonettverschlusses
- Greifen eines schwebenden Objekts.
Überprüfte Betriebsarten:
- automatisch, d. h. am Boden vorprogrammiert,
- Fernbedienung (Teleoperation) an Bord, d. h. ein Astronaut steuert den Roboter mithilfe eines Stereobildschirms,
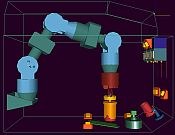
- Teleoperation vom Boden, mithilfe prädiktiver Computergrafik, durch einen menschlichen Bediener, unterstützt durch maschinelle Intelligenz,
- Tele-Sensor-Programmierung, d. h. Lernen durch Vormachen (Teach-in) in einer virtuellen Umgebung am Boden, inklusive der sensorischen Erfassung bzw. Wahrnehmung mit nachfolgender sensorgestützter Ausführung an Bord.
Hauptgründe für den Erfolg von ROTEX:
- hoch entwickelte multisensorische Greifertechnik,
- Ansatz der lokalen Autonomie durch die Fähigkeit zur intelligenten Sensorrückkopplung,
- das Konzept der prädiktiven Grafiksimulation zur Kompensation der fünf bis sieben Sekunden Signallaufzeit.
Das meistbeachtete Experiment war das autonome Einfangen eines freischwebenden Objekts. Es wurde durchgeführt, um die Fähigkeiten der lokalen Rückkopplung für die Fernsteuerung eines Weltraumroboters bei eingeschränkter Datenübertragung zu demonstrieren. Dieses Experiment war die erste Vorstufe in Bezug auf unser Ziel, einen Satelliten in Taumelbewegung einfangen und im Orbit instandhalten zu können.

Downloads
- ROTEX (230k) (224.5 KB)