Telepräsent gesteuerte Roboter für zukünftige Raumfahrtmissionen
Kontur-2
Credit:
RTC/Anastasiya Andrushina, Alexander Silinenko (CC-BY 3.0)
Das Projekt Kontur-2 ist ein Zwischenschritt zu weiterführenden Raumfahrtmissionen, bei denen telepräsent gesteuerte Roboter und Rover Planetenoberflächen erforschen.
Laufzeit
2011 bis 2016: Kontur-2
2017 bis 2020: Vorbereitungen für das geplante Nachfolgeprojekt Kontur-3
Projektpartner
Roscosmos
RTC (Russian State Scientific Center for Robotics and Technical Cybernetics)
RSC-Energia
GCTC (Yuri Gagarin Cosmonaut Training Center)
Projektziele
Entwicklung verschiedener Ein- und Ausgabegeräte für die telepräsente Steuerung von Robotern (Raumfahrttauglicher Force-Feedback-Joystick)
Weiterentwicklung der Telepräsenztechnologien
Durchführung von ISS-Telepräsenz-Experimenten und lokalen Ergonomiestudien zur Untersuchung ergonomischer Parameter in der Schwerelosigkeit
Projektdetails
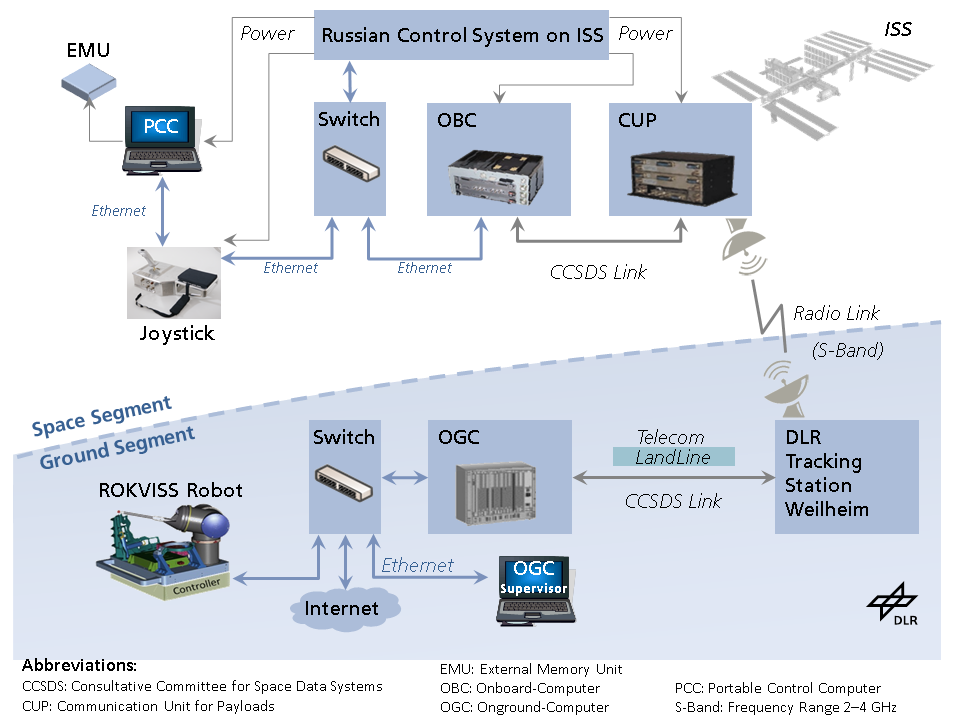
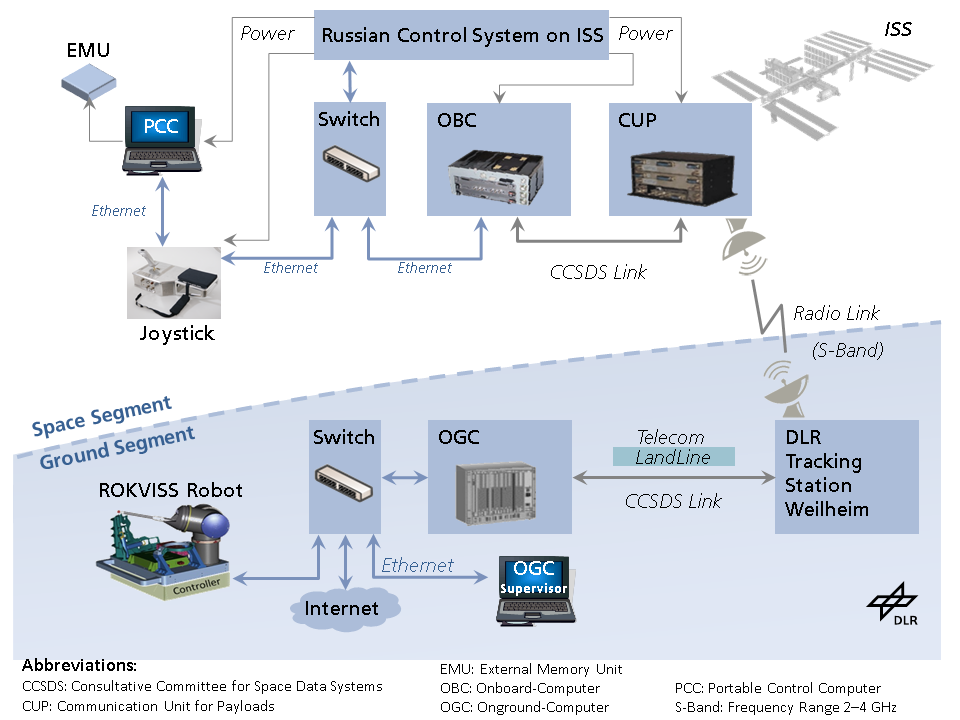
Im Rahmen des Kontur-2-Projekts wurde am Institut für Robotik und Mechatronik ein raumfahrttauglicher, kraftreflektierender Joystick mit zwei Freiheitsgraden entwickelt. Mit Hilfe dieses Joysticks steuerten Kosmonauten von der Internationalen Raumstation (ISS) aus Roboter auf der Erde. Die telepräsent gesteuerten Roboter befanden sich am Institut in Oberpfaffenhofen und beim Projektpartner RTC in St. Petersburg.
Der Kosmonaut steuerte die Position der Roboter und spürte dabei die Kräfte, die bei der Interaktion des Roboters mit der Umgebung auftraten. Für die Datenübertragung zwischen der ISS und der Erde wurde die bereits in den Vorgängerprojekten ROKVISS und Kontur-1 entwickelte Kommunikationsinfrastruktur wiederverwendet.
Die Kontur-2 Forschungsarbeiten liefern die technologische Grundlage für zukünftige planetare Explorationsmissionen, bei denen z.B. anspruchsvolle Montageaufgaben auf einer Planetenoberfläche feinfühlig durchgeführt werden müssen.
Oleg Kononenko mit Kontur-2-Joystick auf ISS
Der Kosmonaut Oleg Kononenko mit dem Kontur-2-Joystick im russischen Segment der ISS




{kind=link}
{kind=link}
{kind=link}