Wartung und Montage in der UmlaufbahnEROSS+
EROSS+ (European Robotic Orbital Support Services) konzipiert künftige Demonstrationsmissionen für die Wartung und Montage in der Umlaufbahn.
| | |
|---|
Laufzeit: | 2021-02-01 bis 2023-01-31 |
Projektpartner: | |
Website: | |
Anwendungsfelder: | Orbitale Robotik |
Förderung: | Horizon 2020, Fördernummer 101004346 |
Projektdetails
Das Ziel von EROSS+ (European Robotic Orbital Support Services +) ist es, eine Demonstrationsmission für künftige On-Orbit-Servicing- und Montageaufgaben zu entwickeln. Die Anwendungen werden so gewählt, dass sie die vorrangigsten Marktbedürfnisse abdecken. Es wird eine europäische Lösung für die Entwicklung des Servicersystems und die künftig zu bedienenden LEO/GEO-Satelliten angestrebt. Dabei wird auf den Roboter-Schlüsseltechnologien aufbaut, die in den letzten Jahren dank der Europäischen Kommission (H2020), der Europäischen Weltraumorganisation (ESA) und nationaler Agenturen gefördert wurden. Die Missionsstudie (Phasen 0/A/B1) wird frühere Entwicklungen der im Rahmen des Strategischen Forschungsclusters (SRC) geförderten Operational Grants (OG-x) validieren. EROSS+ bringt die wesentlichen Raumfahrtindustrien und Kompetenzen zur Gestaltung eines künftigen Ökosystem Weltraums zusammen. Es stärkt die Wettbewerbsfähigkeit der europäischen Raumfahrtindustrie, die sich einem globalen Paradigmenwechsel stellen muss..
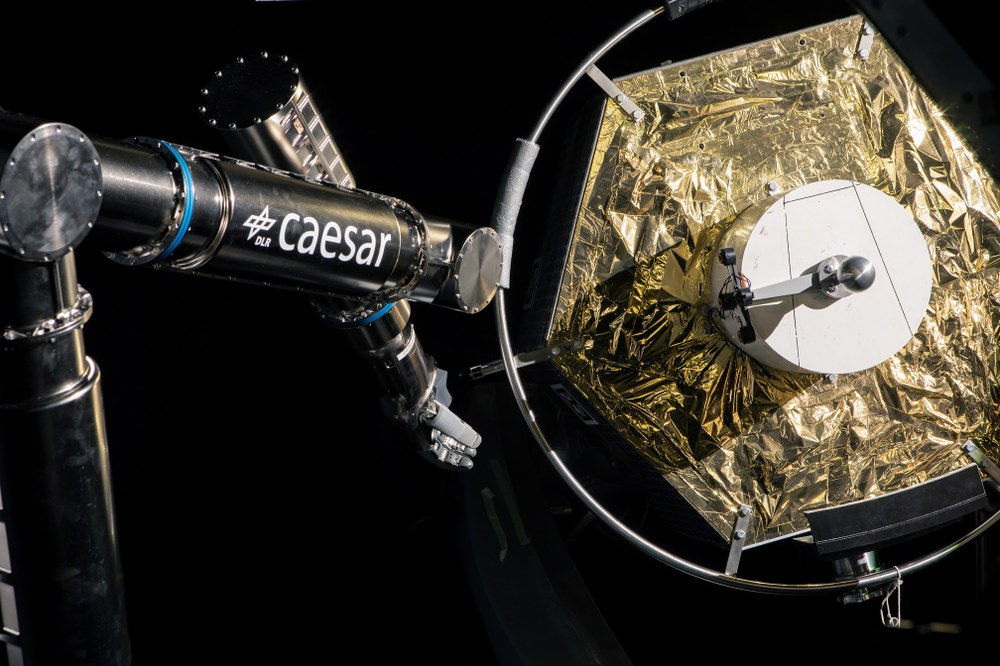
EROSS+ erarbeitet ein vollständiges Konzept für eine Demonstrationsmission, das die gesamte Rendezvous-Phase eines kollaborativen und vorbereiteten Kunden-Satelliten abdeckt, einschließlich des Einfangens, der Wartungsarbeiten (Betankung, Austausch der Nutzlast, Reparatur) und der Montage in der Umlaufbahn. Dies wird die Validierung der Fähigkeiten zur Durchführung aller zukünftigen Operationen in der Umlaufbahn ermöglichen.
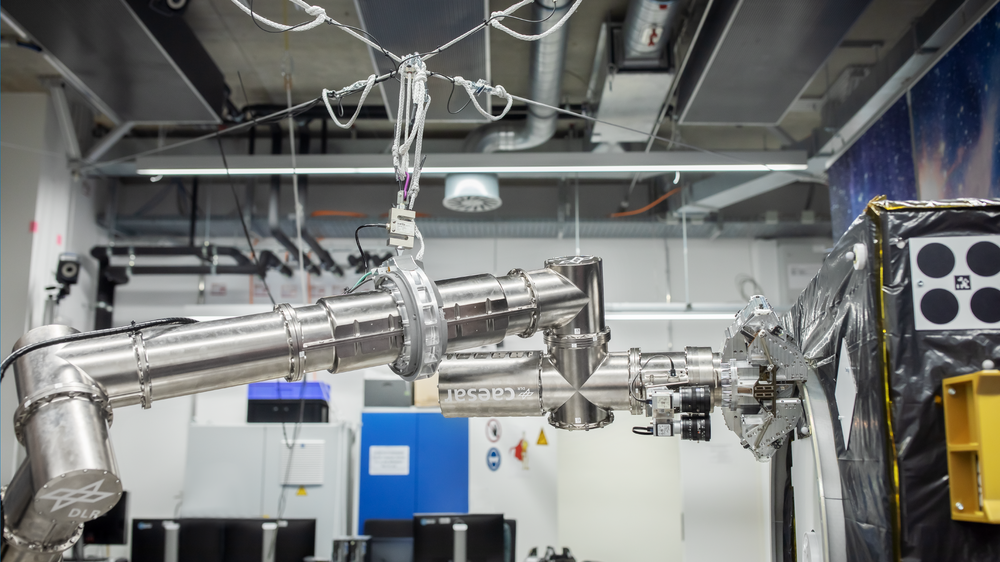
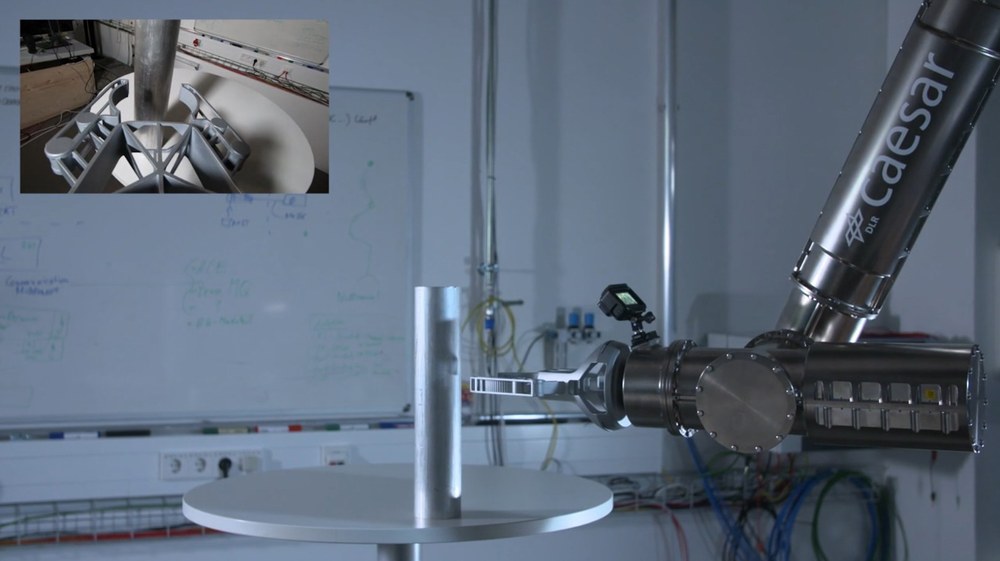
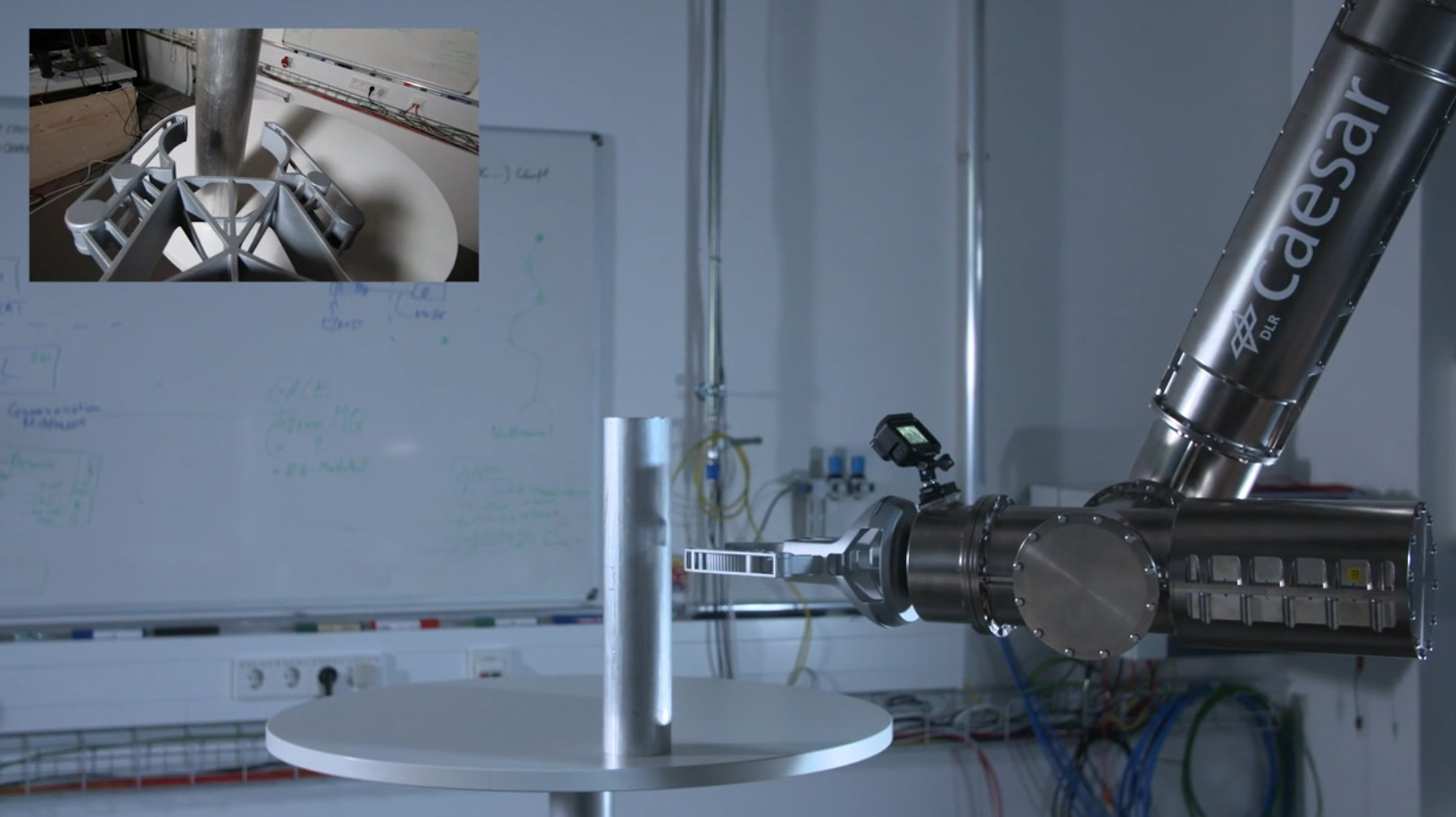
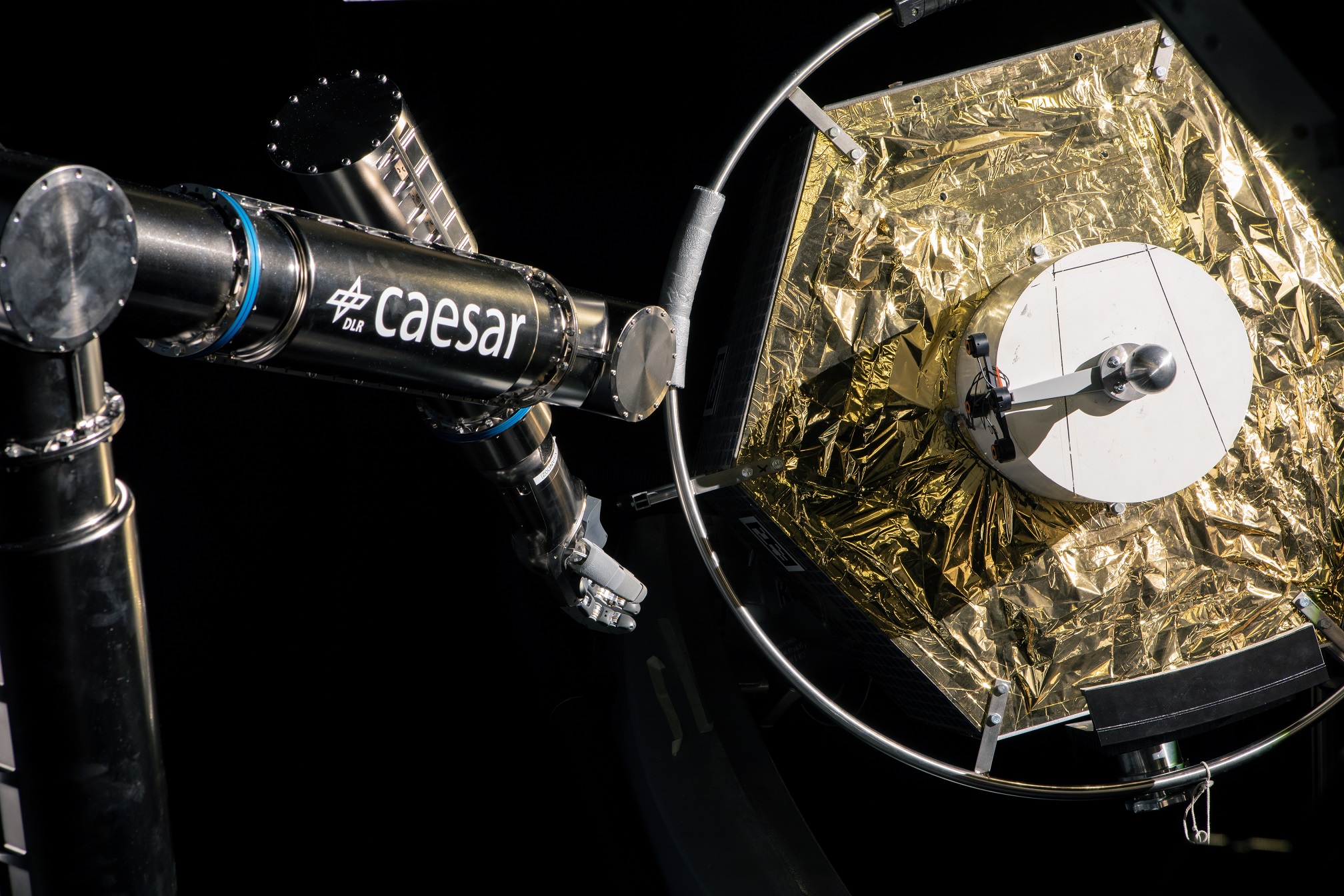
Das Projekt umfasst neben technischen Weiterentwicklungen die Phasen 0, A, B1 für eine On-Orbit-Servicemission, einschließlich einer Missions- und Machbarkeitsanalyse und vorläufiger Definition aller Komponenten. Es zielt darauf ab, den TRL-Level der für die Mission erforderlichen kritischen Blöcke zu verifizieren. Das DLR ist im Rahmen des Projekts für die Robotertechnologien zuständig, wobei der CAESAR-Arm als potenzieller Robotermanipulator für eine solche Mission eingesetzt wird. Im Rahmen des Projekts wird eine Schwerkraftkompensationsvorrichtung (MSS) für CAESAR integriert, um das robotische Sub-System und dessen Funktionaltäten wie das Greifen eines Adapterringes, die Manipulation und die Montage unter 1g Bedingungen zu demonstrieren.


{kind=link}
{kind=link}
{kind=link}