European Robotic Orbital Support Services)EROSS+
EROSS+ (European Robotic Orbital Support Services) is designing the future on-orbit servicing and assembly demonstration missions.
| | |
|---|
Duration: | 2021-02-01 until 2023-01-31 |
Project partners: | |
Website: | |
Fields of Application: | On-orbit servicing, On-orbit assembly |
Funding: | Horizon 2020, Funding No. 101004346 |
Project details
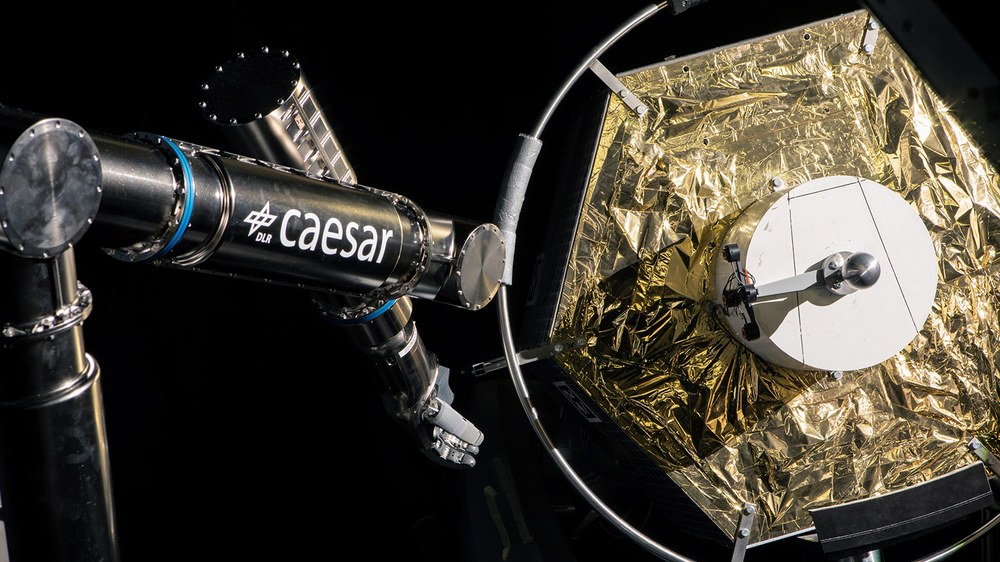
EROSS+ (European Robotic Orbital Support Services +) objective is to design the future on-orbit servicing and assembly demonstration missions that address the most relevant market needs. The goal is to build an European solution for the Servicers and the future serviced LEO/GEO satellites, leveraging on key robotic technologies developed in the past years thanks to the European Commission H2020 Strategic Research Cluster (SRC), the European Space Agency and national agencies initiatives. This Mission Study (phases 0/A/B1) will validate previous developments of the SRC through the so-called OGs (Operatiobal Grants). EROSS+ will pave the way for the future of commercial European space robotic missions. This project gathers all the key players who will shape the future space ecosystems and foster European competitiveness into this global shifting paradigm that space economy is facing. EROSS+ brings in a concept of a demonstration mission that will cover the full rendezvous phase of a collaborative and prepared client satellite including the capture, the servicing operations (refueling, payload exchange, repair) and also in-orbit assembly. This will enable the validation of capabilities to perform all the future on orbit operations.
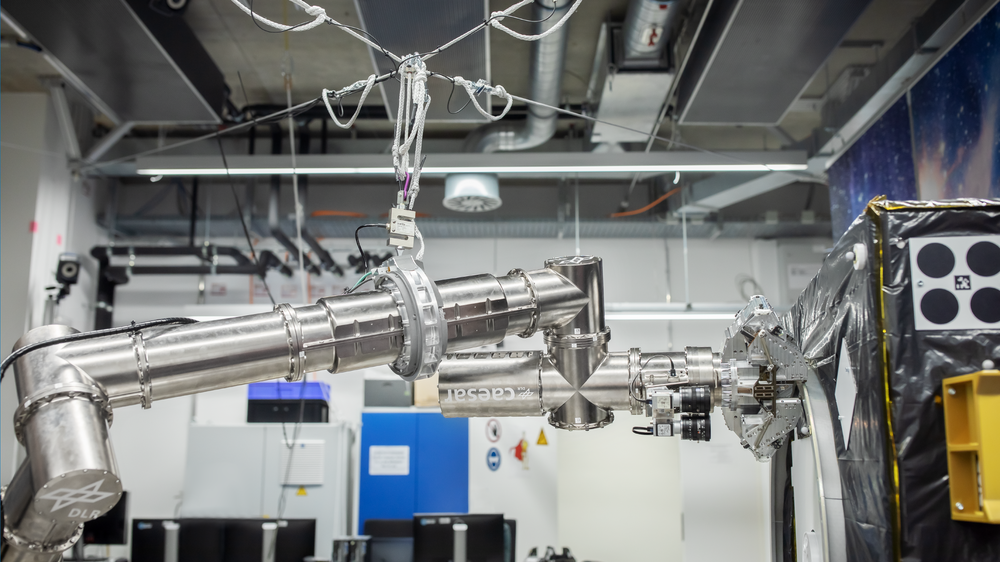
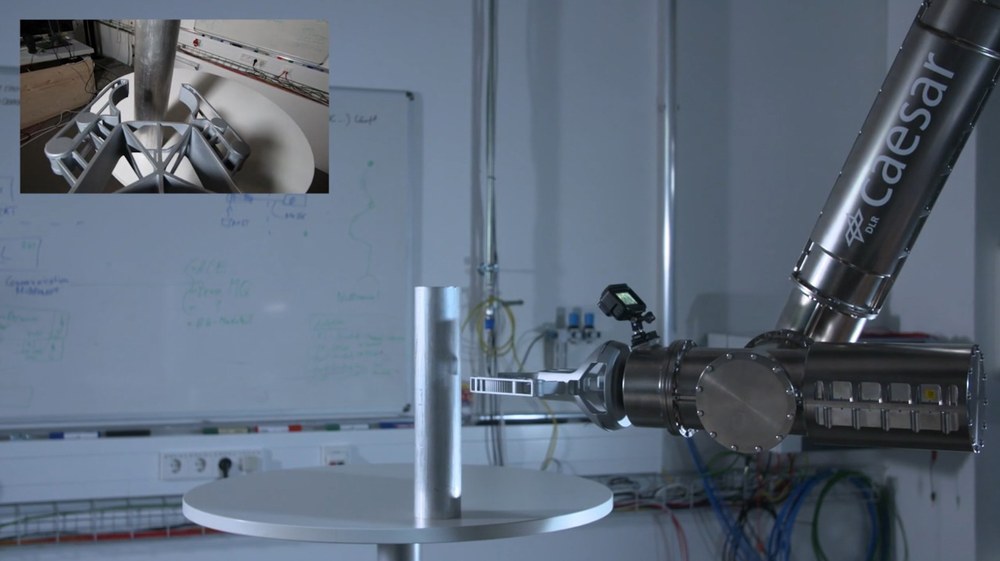
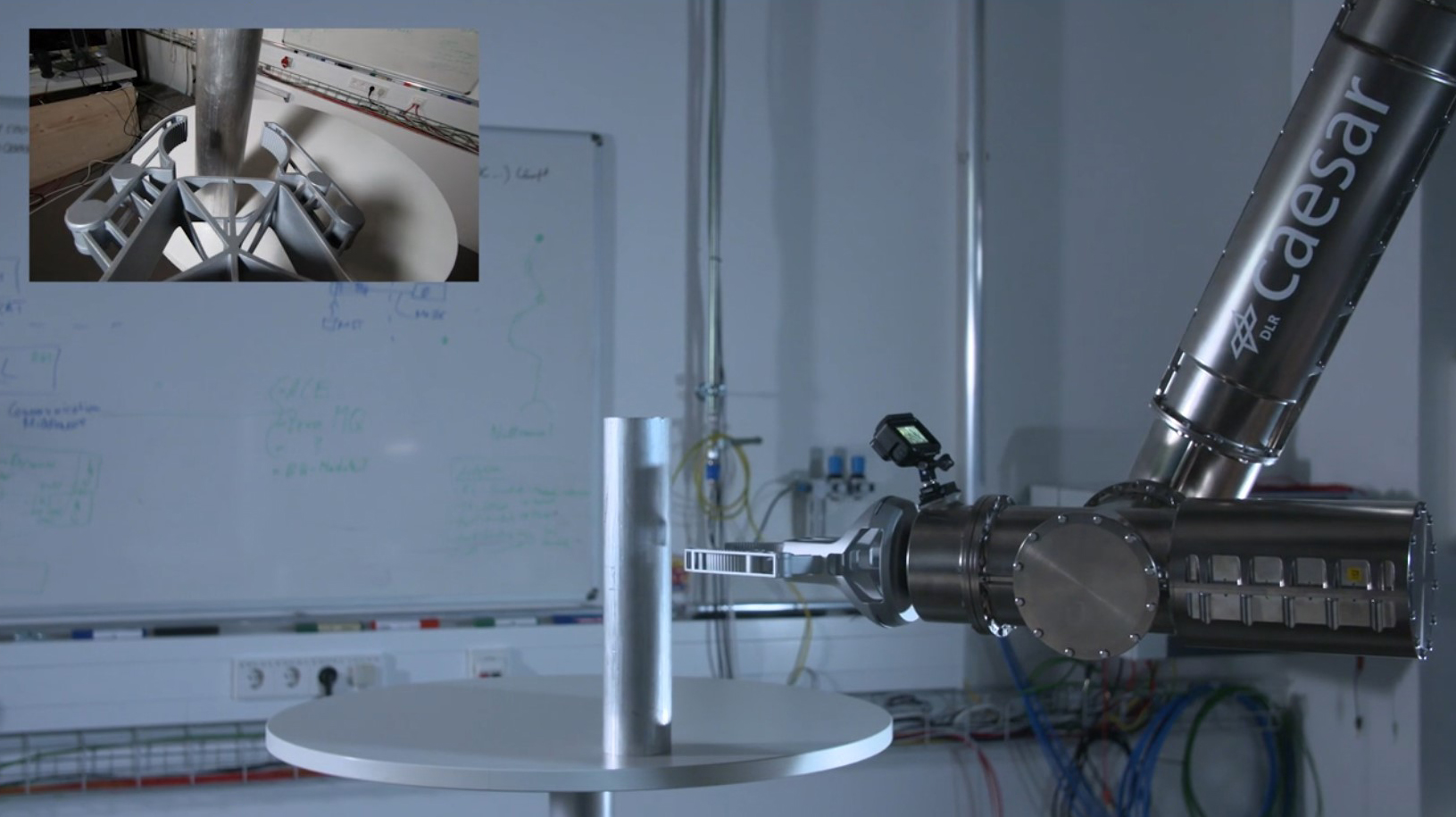
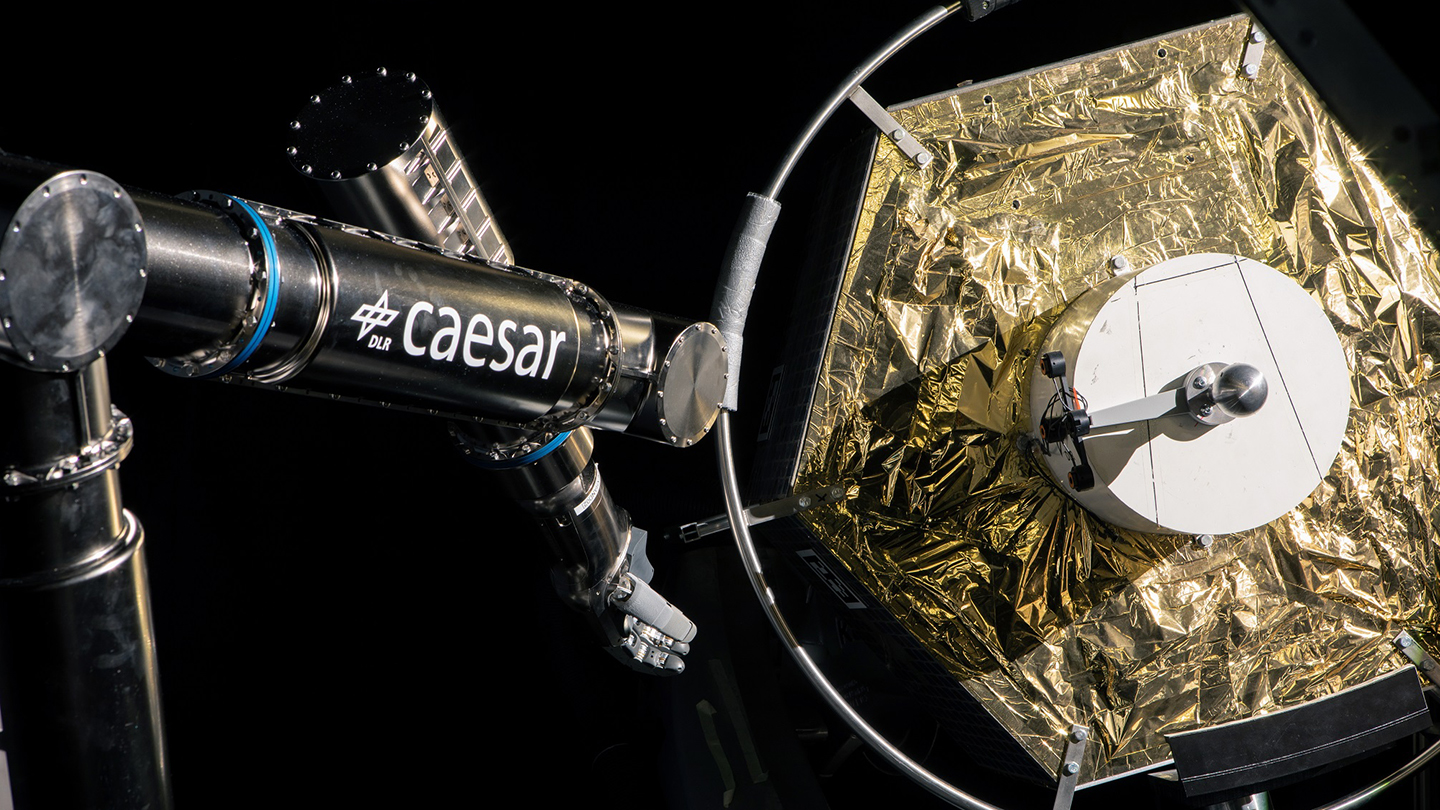
The project is the Phase 0 to Phase B1 study (which includes mission and feasibility analysis and preliminary definition of components) for an on-orbit servicing mission. It aims to verify the TRL level of critical blocks required for the mission. DLR is in charge of the robotic technologies within the project, using the CAESAR arm as potential robotic manipulator for such a mission. Within the project, a gravity compensation device for CAESAR is developed, in order to setup the robot in the DLR labs, and perform demonstrations of grasping, manipulation and assembly using the robotic arm.


{kind=link}
{kind=link}
{kind=link}