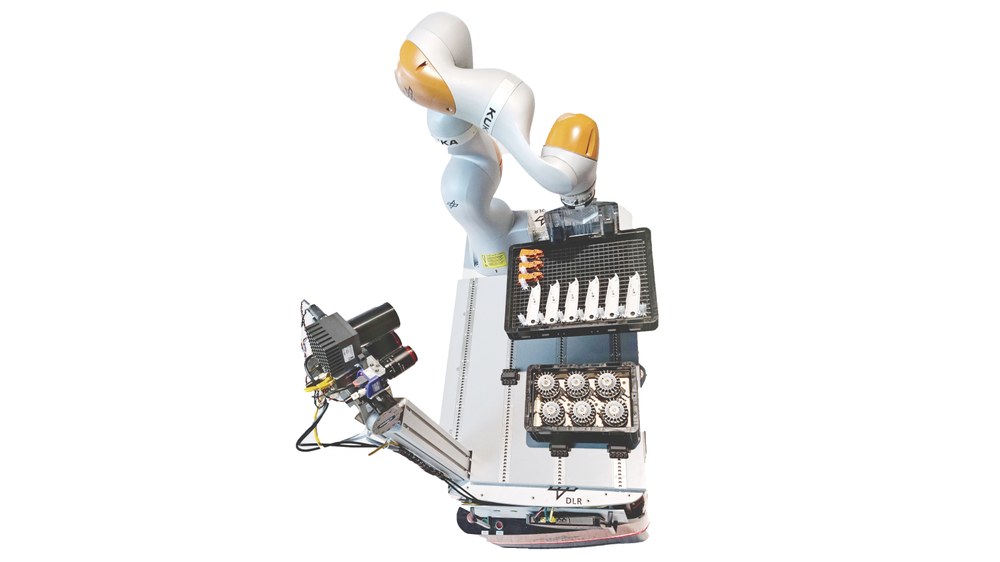
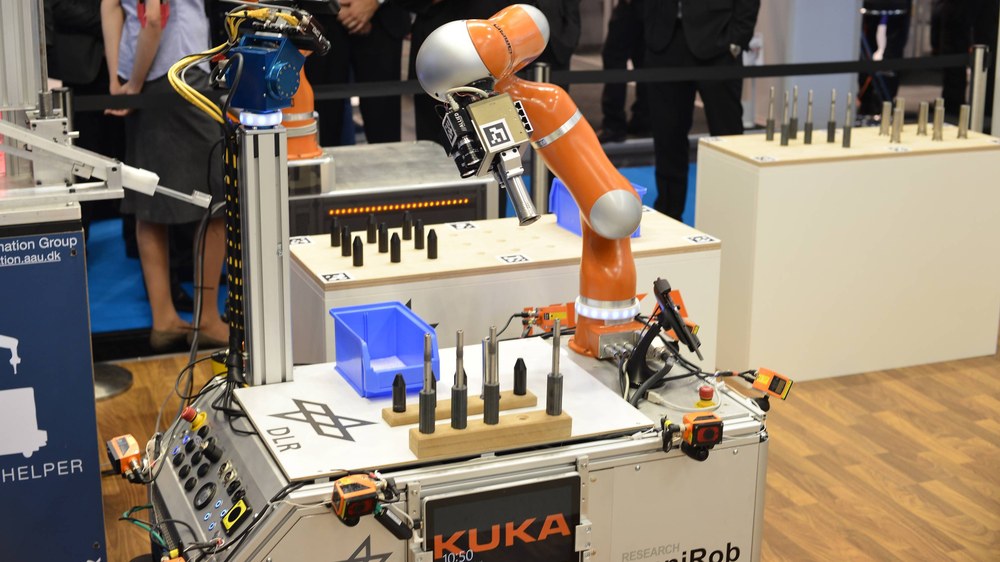
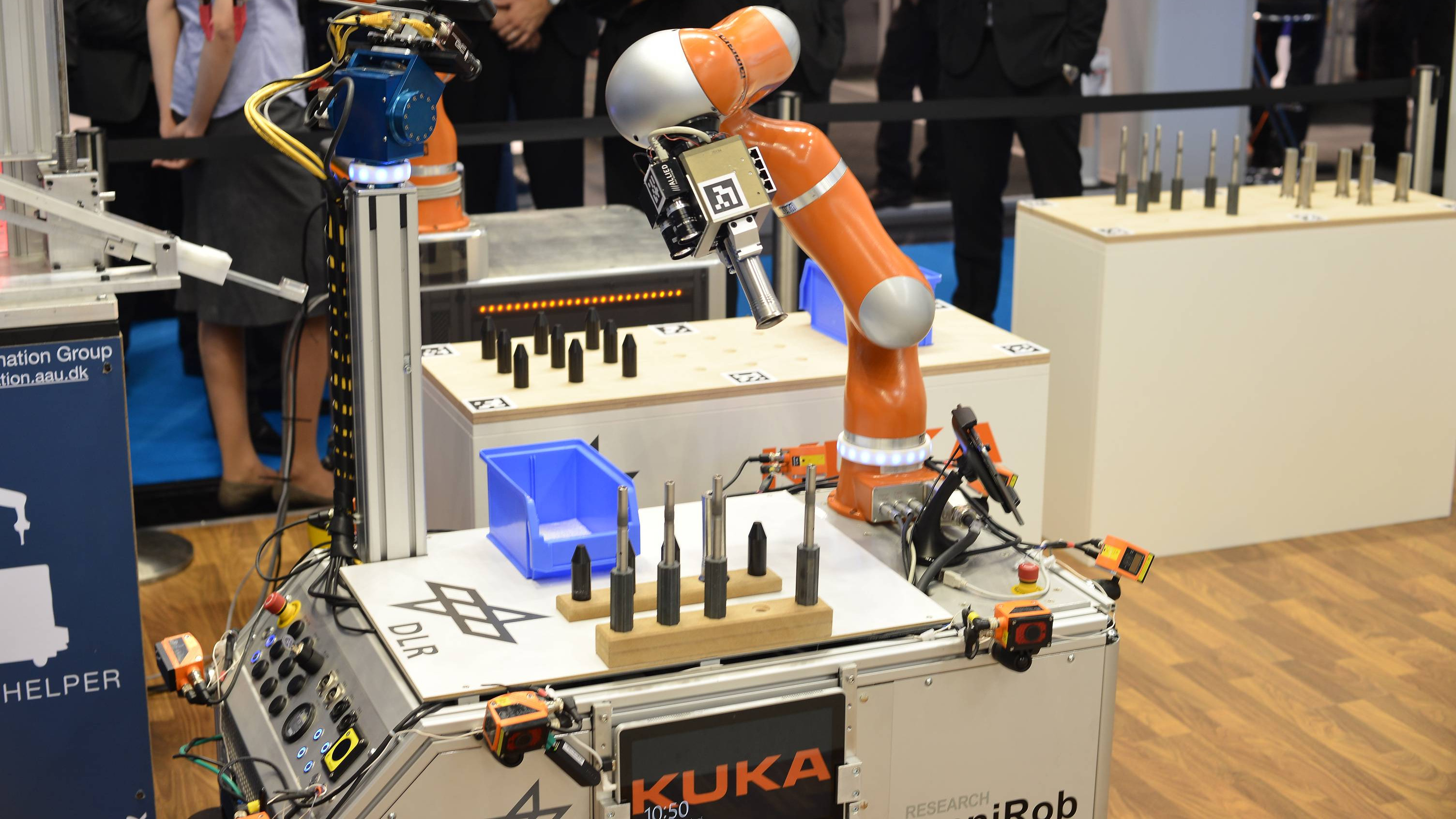
Der Roboter AIMM (Autonome Industrielle Mobile Manipulator) wurde für den hochflexiblen Einsatz in Produktionstätten entwickelt und erschließt durch seine Anpassungsfähigkeit neue Anwendungsfelder der agilen Fertigung. AIMM ist in der Lage, je nach akutem Bedarf vielfältige Aufgaben an verschiedenen Stationen zu übernehmen, wo bisher eine Vielzahl verschiedener spezialisierter Industrieroboter nötig war. 2015 wurde AIMM das erste Mal der Öffentlichkeit vorgestellt. Auf der Automatica 2023 ist eine völlig überarbeitete Version zu sehen.
Technische Daten
Größe:
110 cm x 61 cm x 225 cm
Gewicht:
ca. 450 kg
Freiheitsgrade:
13
Sensorik:
2 Sick S300 Laserscanner
1 Stereo-Kamera RC Viscore
1 Farb-Kamera
Geschwindigkeit:
1–1,5 m/s
Arbeitsraum:
bis zu einer Höhe von 2 m
Besonderheiten:
Mobile Plattform mit Manipulator
Pan-Tilt-Einheit mit Stereo-Kamera und Projektor
Flexibilität durch Werkzeug-Wechsler
Autonome Operation
Systembeschreibung
Eingebettet in die Fabrik der Zukunft des DLR, stellt AIMM einen Fortschritt in der Automatisierung dar. Dieses hochmoderne System ermöglicht die Neukonfiguration anderer Arbeitsstationen und ermöglicht die Anpassungsfähigkeit in industriellen Umgebungen. Mit seiner mobilen Plattform und dem integrierten Manipulator von KUKA ist AIMM zusätzlich mit einem Werkzeugwechsler, einer Schwenk-Neige-Einheit und mehreren Sensoren ausgestattet, die eine nahtlose Wahrnehmung der Umgebung und der zu manipulierenden Objekte ermöglichen. Dank dieser Vielseitigkeit kann AIMM mühelos zwischen verschiedenen Arbeitsstationen wechseln und unterschiedliche Aufgaben übernehmen, wodurch der Bedarf an speziellen Robotern, die sich als unwirtschaftlich erweisen könnten, entfällt. Dadurch eröffnet AIMM neue Anwendungsmöglichkeiten und bewältigt gleichzeitig die technologischen Herausforderungen, die mit einem derart komplexen System verbunden sind. AIMM operiert auf unbekanntem Terrain und reagiert auf dynamische Aufgabenvariationen. Er verfügt über ein hohes Maß an Autonomie, um sich in neuen Umgebungen zurechtzufinden und den Benutzer aktiv bei der Durchführung neuer Aufgaben zu unterstützen. Die Forschungen im DLR in den Bereichen Wahrnehmung, Planung und Ablaufsteuerung haben als Vision des AIMM-Systems: Ein vollständig autonomes, hochentwickeltes Robotersystem. Dabei bleibt AIMM intuitiv bedienbar, sodass Flexibilität und häufige Aufgabenprogrammierung problemlos möglich sind. Mit seiner Integration in die Fabrik der Zukunft des DLR ist AIMM ein Wegbereiter für eine transformative Ära anpassungsfähiger Arbeitsplätze und ermöglicht die Zukunft der industriellen Automatisierung.
Bereits im Rahmen des EU-Projekts TAPAS (2010–2014) wurde AIMM erfolgreich in einem realen industriellen Umfeld angewendet und unterstützte die Montage eines Rotors. Zu den verschiedenen Aufgaben, die autonom durchgeführt werden mussten, zählten: Teile von mehreren Arbeitsplätzen abzuholen, Förderband-Handling, Teile-Transport und Lieferung von Fertigteilen an das Lager. Im Rahmen der European Robotics Challenges EuRoC (2014–2017), verwendeten fünf Challenger-Teams aus ganz Europa eine neuere Version von AIMM, um verschiedene Aufgaben im Spektrum von Roboter-Mensch-Logistik für die Flugzeugmontage bis hin zu Wartungsarbeiten in explosionsgefährdeten Bereichen und Automobillogistik bei einer Automontagelinie zu lösen. Im EU-Projekt RobDREAM (2015–2018) wurde das AIMM-Konzept angewandt, um die Fähigkeit des mobilen Manipulators im Bezug auf die Wahrnehmung, Navigation, Manipulation und das Greifen zu verbessern.
Ausgewählte Veröffentlichungen
[1] Andreas Dömel, Simon Kriegel, Michael Kaecker, Manuel Brucker, Tim Bodenmller and Michael Suppa, "Towards Fully Autonomous Mobile Manipulation for Industrial Environments", International Journal of Advanced Robotic Systems, 2017.
[2] Andreas Dömel, Simon Kriegel , Manuel Brucker and Michael Suppa. "Autonomous Pick and Place Operations in Industrial Production", In Proceedings of 12th International Conference on Ubiquitous Robots and Ambient Intelligence URAI, Goyang city, Korea, October 2015. Best Video Award. [BibTeX][PDF][Video]
[3] Simon Bogh, Casper Schou, Thomas Ruehr, Yevgen Kogan, Andreas Dömel, Manuel Brucker, Christof Eberst, Riccardo Tornese, Christoph Sprunk, Gian D. Tipaldi, and Trine Hennessy. "Integration and assessment of multiple mobile manipulators in a Real-World industrial production facility", In Proceedings of 41st International Symposium on Robotics ISR/Robotik, pages 1–8. VDE, June 2014.
Omnidirektionale Plattform
Das Fahrsystem des AIMM erlaubt dynamische, holonome Manövrierbewegungen.




{kind=link}
{kind=link}
{kind=link}
{kind=link}