
SpaceMouse (1981–1993)
Warum 3D-Bewegung?

In jedem Bereich der Technik gibt es Automaten und Systeme, die in bis zu sechs Freiheitsgraden (3 x Translation, 3 x Rotation) steuerbar sind. Industrieroboter sind die bekanntesten und häufigsten Vertreter dieser Art (neben Helikoptern, Unterwasser- und Raumfahrzeugen), die dank ihrer sechs Freiheitsgrade durch die Bewegung in sechs Gelenken jeden Punkt in ihrem Arbeitsraum in der gewünschten Orientierung erreichen können. In einem noch größeren Rahmen konnten wir in den letzten Jahren eine explosionsartige Steigerung im Bereich der 3D-Computergrafik beobachten.
Bereits in den frühen 1980ern konnten die ersten Gittermodelle von räumlichen Objekten mithilfe der sogenannten Knob-Boxes (Interface mit Buttons) der schnellsten Grafikcomputer auf dem Markt problemlos und interaktiv bewegt werden. Jeder der sechs Freiheitsgrade wurde über eine eigene Schaltfläche geregelt. Dann kamen Grafiksysteme auf den Markt, die die problemlose Manipulation von gerenderten räumlichen Modellen ermöglichten, d. h. drehen, zoomen und verschieben, damit man sie aus jedem Blickwinkel und von jedem Punkt aus betrachten konnte. Die Szenen wurden immer komplexer – zum Beispiel wurden mit der „Reality Engine“ des damaligen Marktführers Silicon Graphics die Spiegelungen auf den räumlichen Karosserien mehrere Male pro Sekunde neu berechnet, wofür ein Großrechner einige Jahre vorher noch Stunden gebraucht hätte.
Parallel zur rasanten Entwicklung in der Grafik konnten wir einen eindeutigen Trend auf dem Gebiet des mechanischen Entwurfs in Richtung Konstruktion und Modellierung neuer Bauteile in einer 3D-Umgebung und anschließendem Transfer der Ergebnisse an eine NC-Maschine ausmachen. Die Maschinen können in fünf oder sechs Freiheitsgraden (DoF) arbeiten, weshalb der steigende Bedarf an komfortablen 3D-Steuerungs- und Manipulationsgeräten nicht überrascht.
Trotz atemberaubender Fortschritte in der Digitaltechnik stellte es sich heraus, dass sich digitale Mensch-Maschine-Schnittstellen (MMS oder HMS) wie Tastaturen nicht für den Gebrauch durch den Menschen eignen, da unsere sensomotorischen Reaktionen und Verhaltensweisen immer analoger Natur bleiben werden.
Die DLR-Steuerkugel – der Vorläufer von Magellan
Ende der 1970er begann das Institut für Robotik und Mechatronik der DLR (damals noch: Deutsche Forschungsanstalt für Luft- und Raumfahrt) mit der Forschung an Geräten für die 6-DoF-Steuerung von Robotergreifern im kartesischen Raum. Nach langwierigen Experimenten stellte es sich um 1981 heraus, dass die Integration eines sechsachsigen Kraft-Momenten-Sensors (jeweils 3 Kraft- und Momentkomponenten) in eine hohle Kunststoffkugel die optimale Lösung war. Solch eine Kugel erfasst die linearen und rotatorischen Auslenkungen, die durch die Kräfte/Momente der menschlichen Hand erzeugt bzw. aufgebracht werden, die dann rechnerisch in Translations- und Rotationsbefehle umgesetzt werden.
Der erste eingesetzte Kraft-Momenten-Sensor arbeitete mit Dehnmessstreifen, die in eine Kunststoff-Hohlkugel integriert waren. Die DLR hat sich das Grundkonzept der näherungsweisen Übereinstimmung des Mittelpunkts eines Hohlkugel-Bedienelements und des Messmittelpunkts eines integrierten 6-DoF-Kraft/Momenten-Sensors in Europa (1982) und den USA (1983) patentieren lassen.
Im Zeitraum 1982 bis 1985 zeigten die ersten Prototyp-Anwendungen, dass sich die DLR-Steuerkugel nicht nur exzellent als Steuerungsgerät für Roboter eignete, sondern auch für das erste 3D-Grafiksystem, das damals auf den Markt kam. Der große wirtschaftliche Durchbruch wurde durch den recht hohen Kaufpreis von ca. 8000 US-Dollar pro Einheit verhindert. Es sollte bis 1985 dauern, bis die Entwicklergruppe des DLR ein sehr viel günstigeres optisches Messsystem entworfen hatte. Bei diesem neuen System kamen sechs eindimensionale Positionsdetektoren zum Einsatz. Das System erhielt ein weltweites Patent.
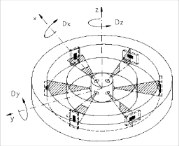
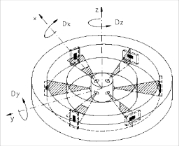
Das Messsystem besteht aus einem inneren und einem äußeren Teil. Die Messanordnung im inneren Ring besteht aus der LED, einem Schlitz und einem – zum Schlitz um 90° gedrehten – linearen lageempfindlichen Positionsdetektor (PSD) auf der gegenüberliegenden Seite des Rings. Die Schlitz/LED-Anordnung ist gegen das restliche System bewegbar ausgeführt. Sechs solcher Systeme sind, um jeweils 60° versetzt, in einer Ebene montiert, wobei die Schlitze abwechselnd senkrecht und parallel zur Ebene ausgerichtet sind. Der Ring mit den PSDs ist im Innern des äußeren Teils befestigt und über Federn mit der LED-Schlitz-Basis verbunden. Die Federn bringen den inneren Teil wieder in die neutrale Ausgangslage, sobald keine Kräfte oder Drehmomente mehr wirken.
Es gibt eine besonders einfache und einzigartige Umsetzung der PSD-Signale U1 bis U6 zu den unbekannten Auslenkungen. Dieses Messsystem weist keinerlei Drift auf und ist keinen Alterungseffekten ausgesetzt.

Die gesamte Elektronik, inklusive der rechnerischen Verarbeitung auf einem Ein-Chip-Prozessor, konnte bereits auf zwei beidseitig bestückten SMD-Platinen in die Kugel integriert werden und die Herstellungskosten wurden auf unter 1000 US-Dollar gesenkt, aber der Verkaufspreis lag immer noch um die 3000 Dollar. Die „Dimension Six“-Ausführung der Kugel wurde in Lizenz durch das Unternehmen CIS produziert. Die Kugel wurde 1988 in den USA zwar zum „Product of the Year“ gekürt, aber es fanden trotzdem nur wenige Hundert Systeme in diesen frühen Jahren einen Käufer.
Die ursprünglich gehegten Hoffnungen der Entwicklergruppe, dass die Lizenzunternehmen die Geräte im Sinne geringerer Herstellungskosten neu- bzw. weiterentwickeln könnten, hatten sich nicht bewahrheitet. Zum anderen erschienen mit der Zeit weitere technologisch vergleichbare Kugelsysteme auf dem Markt, insbesondere in den USA. Sie unterschieden sich lediglich in der Art des Messsystems und stellten somit eine Verletzung des DLR-Patents dar. Um 1990 kamen Begriffe wie Cyberspace und Virtual Reality auf. Allerdings führt der Aufwand, sich in einer virtuellen Welt mit Helm und Handschuh zu bewegen, schnell zu Ermüdungserscheinungen. Die Bewegungen wurden mit elektromagnetischen oder ultraschalltechnischen Mitteln erfasst und gemessen, wobei die Steuerung bzw. Kontrolle translatorischer Geschwindigkeiten für den menschlichen Kopf eine erhebliche Schwierigkeit darstellt. Darüber hinaus ist es recht schnell ermüdend, die Hand im freien Raum zu bewegen. Daher schien eine Neuentwicklung der Kugel dringend geboten.
Das Ergebnis einer langen Kette von Entwicklungen
Angesichts der in den vorstehenden Abschnitten erläuterten Entwicklungen rief die DLR-Entwicklungsgruppe ein Transferunternehmen mit Namen Space Control ins Leben, das ein klares Ziel verfolgte: Die Neukonzeption und Optimierung der Steuerkugel mit ihrem unübertroffenen opto-elektronischen Messsystem:
- Senken der Fertigungskosten auf einen Bruchteil des bisherigen Betrags und dadurch Annäherung an das Preisniveau einer hochwertigen PC-Maus, zumindest langfristig.
- Das neue Manipulationsgerät würde auch wie eine normale PC-Maus funktionieren und aussehen können, aber seine Vielseitigkeit in einer realen computergestützten Entwurfsumgebung dennoch nicht verlieren.

{kind=link}
{kind=link}
Das Ergebnis einer intensiven Entwicklungsarbeit von einem Jahr war die europäische SPACE MOUSE, die den USA unter dem Namen Magellan bekannt wurde. Das Spin-off-Unternehmen Space Control begann Magellan schwerpunktmäßig auf dem europäischen Markt zu vertreiben. 1993 wandten sich das DLR und Space Control zwecks Marketing und Vertrieb von Magellan in den USA und Asien gemeinsam an Logitech als einem Unternehmen mit der nötigen Expertise auf dem Gebiet der Zeige- und Eingabegeräte für Computer.
Das verschleißfeste und driftlose optoelektronische 6-Komponenten-Messsystem wurde dahingehend optimiert, dass die gesamte Elektronik, inklusive der analogen Signalverarbeitung, A/D-Umsetzung, rechnerischen Auswertung und der Stromversorgung auf nur einer Seite einer winzigen SMD-Karte im Innern der Magellan-Steuerkappe untergebracht werden konnte. Für die Stromversorgung reichten einige wenige Milliampere aus, die über den seriellen Port jedes PCs oder über die Standardschnittstelle einer Maus bereitgestellt werden können. Es wurde kein gesondertes Netzteil oder ähnliches benötigt. Die hauptsächlich im Zeitmultiplexbetrieb arbeitende Elektronik wurde im Vergleich zu früheren Steuerkugeln um den Faktor 5 vereinfacht. Aus der außerordentlich langen konstruktiven Optimierung, bei der die unkomplizierte Verstellung der PSDs in Bezug auf die Schlitze eine zentrale Rolle im Aufbau des Sensors spielte, sind schließlich drei Spritzgussteile hervorgegangen: das Grundgehäuse, eine Steuerkappe mit internem Messsystem und ein kleines 9-Tasten-Bedienfeld. Das aus Blech gestanzte Gehäuse bot Magellan die erforderliche Masse für ausreichende Stabilität und es konnte auf jede Art der spanabhebenden Bearbeitung verzichtet werden. Die kleine Platine im Innern der Kappe (inklusive Beeper) übernahm auch verschiedene konstruktive Funktionen. So war sie zum Beispiel Träger für die automatenbestückbaren Federn und bot Überlastschutz. Die Federelemente waren soweit auf das Messsystem hin optimiert, dass sie keinerlei Hysterese mehr aufwiesen, aber durch die Wahl der geeigneten Federn trotzdem die gewünschte Steifigkeit der Kappe realisiert werden konnte.

In ergonomischer Hinsicht wurde Magellan im Aufbau möglichst flach ausgeführt, sodass die menschliche Hand ermüdungsfrei darauf aufliegen kann. Geringe Drücke der Finger auf die Kappe der Magellan reichen für signalerzeugende Auslenkungen in den X-, Y-, und Z-Ebenen aus, wodurch ein Mauszeiger oder ein 3D-Grafikobjekt translational durch den Raum bewegt wird.
Leichte Drehungen an der Kappe lassen das 3D-Grafikobjekt um die entsprechende Achse rotieren. Das Bewegen eines ‚schwebenden‘ Objekts in sechs Freiheitsgraden geschieht intuitiv und ohne Anstrengung. In ähnlicher Weise macht das Fliegen durch eine virtuelle Welt einfach Spaß. Auf Tastendruck öffnen sich die üblichen Menüs, können Betriebsarten gewählt oder 3D-Objekte ‚angefasst‘ werden.
Die Magellan-Technologie war im Weltraum – Wie sieht die Zukunft aus?

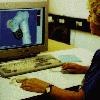
Die DLR-Steuerkugel war als Vorläufer der Magellan ein entscheidendes Element des ersten realen Roboters im Weltall, ROTEX, der im April 1993 an Bord des Space Shuttle Columbia eingebaut in einem Rack des Spacelab-D2 mitflog. Der Roboter wurde direkt von den Astronauten mit der Steuerkugel ferngesteuert, konnte aber auch vom Boden (online und offline) über „prädiktive“ Stereografik ferngesteuert werden.
So hat zum Beispiel der Operateur am Boden mit einer der beiden Kugeln bzw. ‚Magellanen‘ den Robotergreifer in der grafischen Vorsimulation gesteuert, während er mit dem zweiten Gerät die gesamte Szene in 6 DoF frei und stufenlos bewegen konnte. Dank der prädiktiven Grafiksimulation im Verbund mit der oben aufgeführten Mensch-Maschine-Interaktion konnten Signallaufzeiten von bis zu sieben Sekunden kompensiert werden, wobei die spektakulärste Leistung darin bestand, ein frei schwebendes Objekt im Weltraum vom Boden aus gesteuert zu ergreifen. Seit dieser Zeit ist ROTEX oft als die erste wirkliche „Virtual Reality“-Anwendung bezeichnet worden.
Die Grafiksimulation und Manipulation von räumlichen 3D-Objekten und virtuellen Welten und deren Kombination, z. B. mit realen Informationen wie in TV-Bildern (Multimedia), ist nicht nur für die Raumfahrttechnik von Bedeutung, sie wird auch die ganze Welt der Fertigungs- und Konstruktionstechnik grundlegend verändern, wozu auch weitere Bereiche wie Stadtentwicklung, Chemie, Biologie und Unterhaltung gehören. Wir sind der Überzeugung, dass es für all diese Anwendungen keine MMS-Technologie gibt, die es mit der Einfachheit und dennoch höchsten Präzision von Magellan aufnehmen kann. Sie kann für 3D-Manipulationen in sechs Freiheitsgraden eingesetzt werden, aber eben auch als konventionelle 2D-Maus.