
Mechatronik von David
Mechanik
Anthropomorpher Leichtbau-Roboter
Übersicht
- Variable passive Flexibilität in jedem Gelenk
- Menschenähnliche Stärke
- Menschenähnlicher Bewegungsbereich
- Robust gegenüber Kollisionen
- Speicher für potentielle Energie in jedem Gelenk
- Drei verschiedene Konzepte von variablen Steifigkeitsaktoren (VSA)
- KEINE Drehmomentsensoren
- Vollständig integrierte Elektronik
- Modulares Design
Variable Steifigkeitsaktoren (VSA)


Das Hand Arm System ist mit drei verschiedenen Typen von variablen Steifigkeitsaktoren ausgestattet:
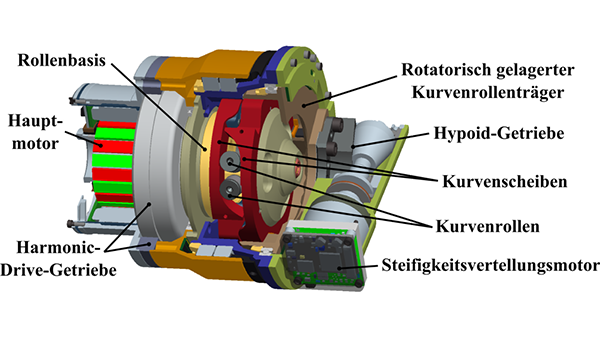
Antagonismus (20 DoF Hand):
- Zwei gleiche Motoren verstellen die Steifigkeit und ändern die Position
- Progressiver Federmechanismus in den Seilzügen
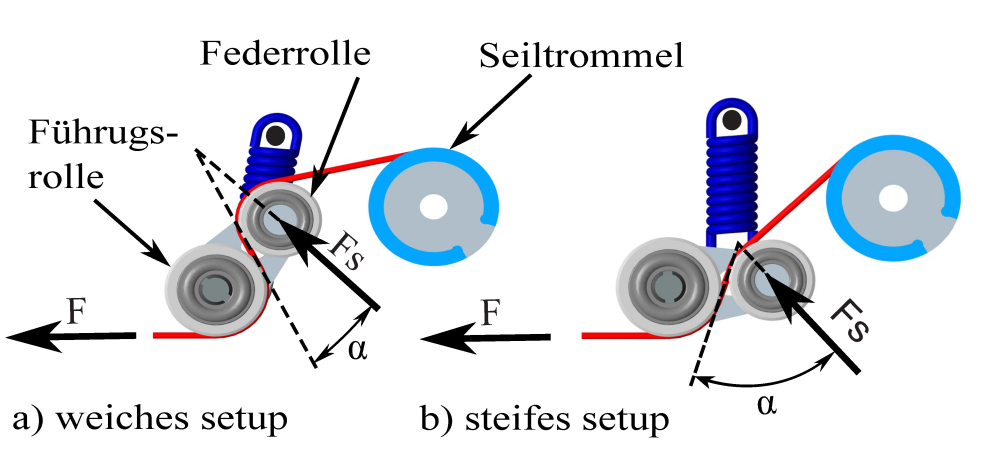
BAVS - Bidirektionaler Antagonismus (2 DoF Handgelek,1 DoF Unterarmrotation):
- Zwei gleiche Motoren verstellen die Steifigkeit und ändern die Position
- Asymmetrische Kurvenscheibenform
- Redundanter Gelenksantrieb
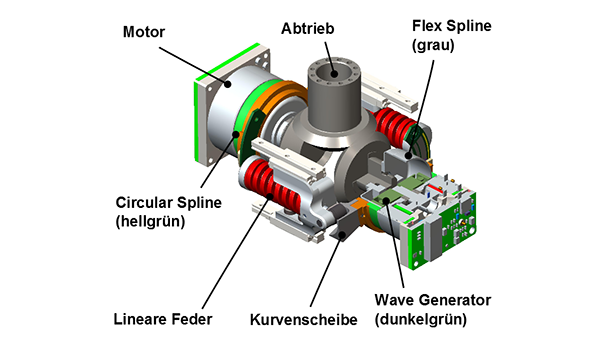
FSJ - Floating Spring Joint (4 DoF Schulter- und Oberarmgelenke):
- Ein großer Motor für die Gelenksposition
- Ein kleiner Motor für Änderung der Steifigkeit
- Eine einzelne Feder
Elektronik
Die gesamte Elektronik zeichnet sich insbesondere durch eine hohe Integrations- und Leistungsdichte aus.
Im Unterarm enthaltene Komponenten
- 42 intelligente Motormodule mit integrierten Leistungsumrichtern mit einer Spitzenleistung von bis zu 180 W
- FPGA-basierte Regelung
- 12 V und 5 V Spannungsversorgung und -verteilung
- Sensoren zur Messung der Federauslenkung
In Oberarm und Schulter enthaltene Komponenten
- Acht Motoren mit einer Spitzenleistung von bis zu 1 kW
- Modulare Leistungsumrichter
- Sensoren zur Messung der Federauslenkung
- FPGA-basierte Regelung
Maßgeschneidertes Netzteil (IGOR)
- Fünf unabhängige 24 und 48 V Ausgänge mit Sanftanlauf und flinker elektronischer Sicherung für die Komplettversorgung eines Arms
- 4 kW Spitzenleitung als Quelle und Senke
- Energiespeicherung in Superkondensatoren erlaubt den Betrieb an normaler Steckdose
- Steuerbar über Touchscreen oder RS232/USB
Ausgewählte Veröffentlichungen
Friedl, W., Chalon, M., Reinecke, J. and Grebenstein, M., FAS A flexible antagonistic spring element for a high performance over, Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on, 2011, pp. 1366-1372. [elib]
Friedl, W., Hoppner, H., Petit, F. and Hirzinger, G., Wrist and forearm rotation of the DLR Hand Arm System: Mechanical design, shape analysis and experimental validation, Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on, IEEE/RSJ, 2011, pp. 1836-1842. [elib]
Wolf, S., Eiberger, O. and Hirzinger, G., The DLR FSJ: Energy based design of variable stiffness joints, Robotics and Automation (ICRA), 2011 IEEE International Conference on, IEEE, 2011, pp. 5082 - 5089. [elib]
Wolf, S. & Hirzinger, G., A New Variable Stiffness Design: Matching Requirements of the Next Robot Generation, Robotics and Automation (ICRA), IEEE International Conference on, 2008, 1741-1746. [elib]
Grebenstein, M. & van der Smagt, P., Antagonism for a highly anthropomorphic hand-arm system, Advanced Robotics, 2008, 22, 39-55. [elib]