
Mechatronics of David
Mechanics
Anthropomorphic light weight robot
Overview
- Variable passive compliance in each joint
- Human like strength
- Human like range of motion
- Robust to impacts
- Potential energy storage in joints
- Three different Variable Stiffness Actuator (VIA) concepts
- No torque sensors
- Fully integrated electronics
- Modular design
Variable Stiffness Actuators (VSA)


The Hand Arm System is equipped with 3 types of Variable Stiffness Actuators:
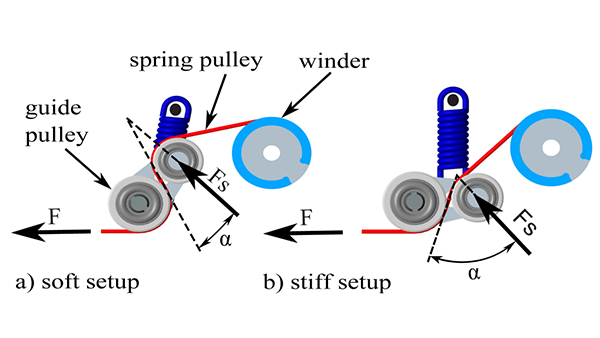
Antagonism (20 DoF Hand):
- Two equivalent motors adjusting joint stiffness and position in-tendon progressive spring mechanism
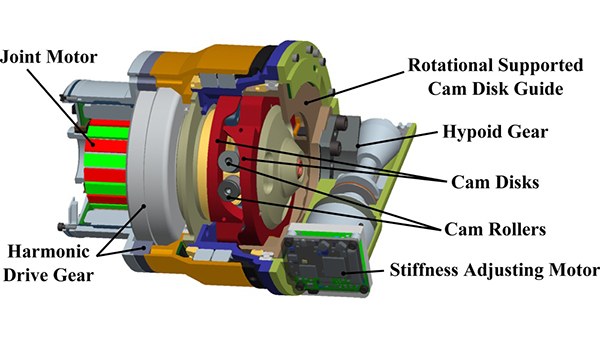
BAVS - Bidirectional Antagonism with Variable Stiffness Actuation (2 DoF wrist,1 DoF forearm-rotation):
- Two equivalent motors adjusting joint stiffness and position
- Asymmetric cam disc shape
- Redundant joint actuation
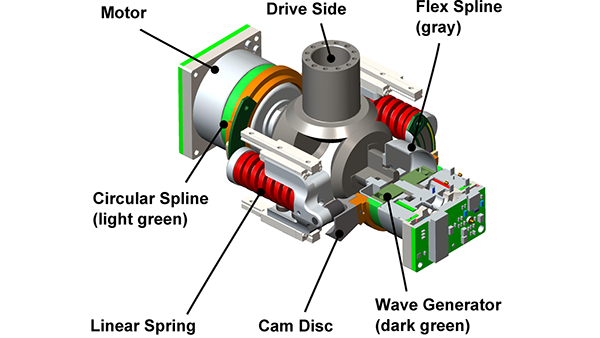
FSJ - Floating Spring Joint (4 DoF upper arm joints):
- One big motor for joint positioning
- One small motor to change the stiffness
- One single spring
Electronics
Very high integration and power density
Units integrated in the forearm
- 42 intelligent motor modules with integrated power inverters and 180 W peak power each
- Two FPGA based control units
- 12 V and 5 V power supplies and distribution
- Spring deflection sensors
Units integrated in the upper arm / shoulder
- Eight motors with up to 1 kW peak power
- Modular power inverters
- Spring deflection sensors
- Control units
Customized power supply (IGOR)
- Five independent 24 V and 48 V outputs with soft start and fast electronic fuse to power the complete Hand Arm System
- 4 kW peak source and sink capability
- Energy storage using supercapacitors allows operation from standard wall outlet
- Control via touch screen display or USB/RS232
Selected Publications
Friedl, W., Chalon, M., Reinecke, J. and Grebenstein, M., FAS A flexible antagonistic spring element for a high performance over, Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on, 2011, pp. 1366-1372. [elib]
Friedl, W., Hoppner, H., Petit, F. and Hirzinger, G., Wrist and forearm rotation of the DLR Hand Arm System: Mechanical design, shape analysis and experimental validation, Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on, IEEE/RSJ, 2011, pp. 1836-1842. [elib]
Wolf, S., Eiberger, O. and Hirzinger, G., The DLR FSJ: Energy based design of variable stiffness joints, Robotics and Automation (ICRA), 2011 IEEE International Conference on, IEEE, 2011, pp. 5082 - 5089. [elib]
Wolf, S. & Hirzinger, G., A New Variable Stiffness Design: Matching Requirements of the Next Robot Generation, Robotics and Automation (ICRA), IEEE International Conference on, 2008, 1741-1746. [elib]
Grebenstein, M. & van der Smagt, P., Antagonism for a highly anthropomorphic hand-arm system, Advanced Robotics, 2008, 22, 39-55. [elib]