Vorbereitung und Demonstration autonomer OOS-Roboteroperationen im Orbit
EROSS IOD
Credit:
PR
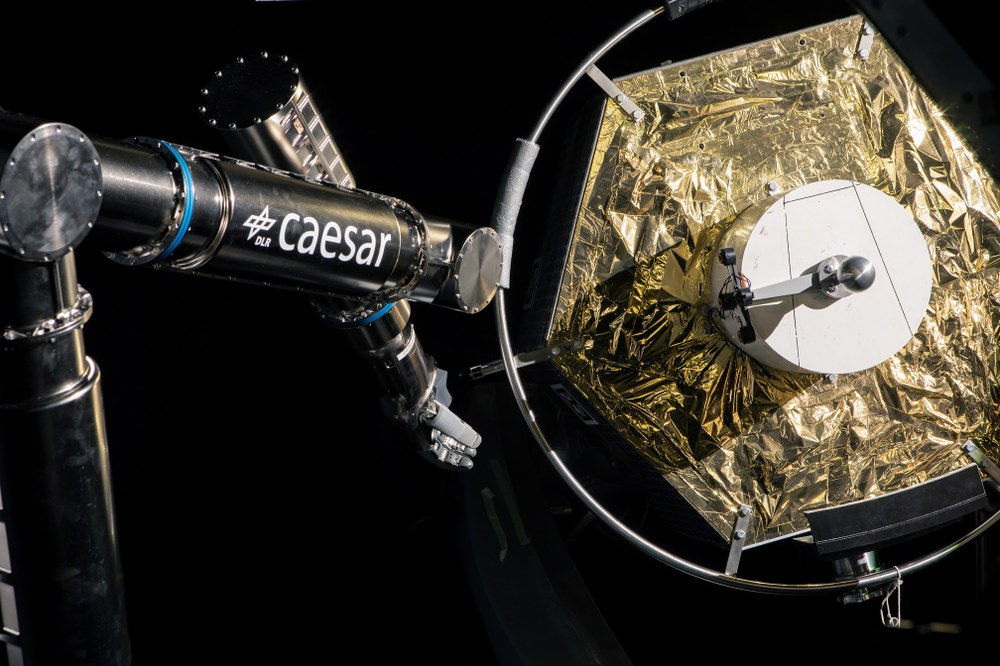
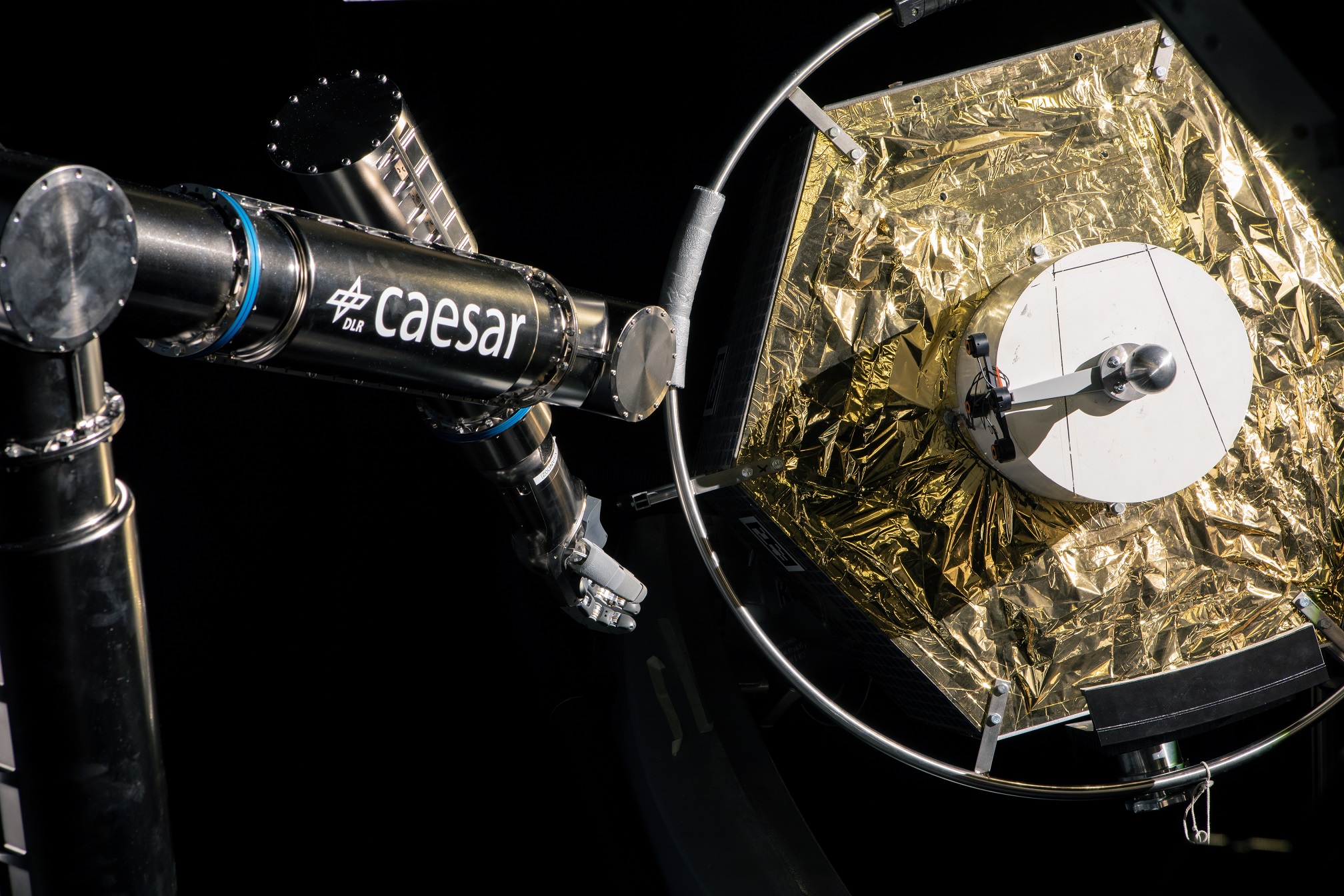
Das Hauptziel von EROSS IOD besteht in der Bearbeitung der Phasen B2/C für eine Demonstrationsmission, um den Markteintritt für zukünftige OOS-Missionen vorzubereiten. Dabei werden alle wesentlichen Funktionen im Orbit demonstriert: Anflug und Rendezvous zweier frei fliegender Raumfahrzeuge mit vergleichbarer Masse und Trägheit und mittels eines Serviceroboters autonom durchgeführte Roboteroperationen wie das Einfangen, Betanken und den Austausch von Nutzlasten.
Um eine solide und kostengünstige Lösung zu gewährleisten, stützt sich das Projekt auf vorangegangene Entwicklungen, die in den letzten sechs Jahren im Rahmen des Strategischen Forschungsclusters (SRC) für Weltraum-Robotertechnologien durchgeführt wurden, hierbei insbesondere den Projekten EROSS und EROSS+.
Letztendlich ist Ziel von EROSS IOD die Vorbereitung und Ausführung der letzten notwendigen Schritte, um bis 2026 eine europäische Pioniermission auf Basis eines kundenorientierten Ansatzes zu fliegen.
Laufzeit:
2023-01-01 bis 2025-03-31
Projektpartner:
• Thales Alenia Space France • DLR, Deutsches Zentrum für Luft- und Raumfahrt • GMV • PIAP Space • SINTEF • Thales Alenia Space Italy • SENER • Space Application Services • TIPIK Communication Agency • Exotrail • Kongsberg Defence and Aerospace • Network Research Belgium • Thales Alenia Space Spain • GMVIS Skysoft • Thales Alenia Space Switzerland • Almatech • CSEM
Der Zugang zum Weltraum wird immer einfacher, und es wird in Zukunft nicht mehr möglich sein, Satelliten zu entwickeln und in den Orbit zu verbringen, ohne die Folgen zu bedenken: On-Orbit-Servicing (OOS) ist ein erster Schritt in Richtung dieses Paradigmenwechsels, da die Technologien, die typischerweise für autonomes Rendezvous, Betankung, Austausch von Orbital Replaceable Units (ORU), Reparatur und Abfallentsorgung mit autonomen Robotersystemen eingesetzt werden, in künftigen intelligenten, flexiblen und modularen Raumfahrtinfrastrukturen zum Einsatz kommen werden. Die wachsende Nachfrage kommerzieller Kunden nach einer der Lebensdauerverlängerung von Satelliten, lassen OOS zu einem aufstrebenden Markt werden.
Zu diesem Zweck ist das Hauptziel von EROSS IOD, in den Phasen B2/C die finale Mission zu entwerfen und die Technologien zu entwickeln, um eine Markteinführung für zukünftige OOS-Missionen zu ermöglichen. Ziel ist es, die Demonstration aller Schlüsselfunktionen in der Erdumlaufbahn: Anflug und Rendezvous zweier frei fliegender Raumfahrzeuge mit vergleichbarer Masse und Trägheit im Nahbereich und mittels eines Serviceroboters autonom durchgeführte Roboteroperationen wie das Einfangen, Betanken und den Austausch von Nutzlasten. Um eine solide und kostengünstige Lösung zu gewährleisten, stützt sich das Projekt auf die Entwicklungen, die in den letzten sechs Jahren im Rahmen des Strategischen Forschungsclusters (SRC) für Weltraumrobotik-Technologien durchgeführt wurden, insbesondere auf die Kontinuität der früheren Projekt EROSS und EROSS+.
Letztendlich ist das Ziel von EROSS IOD die Vorbereitung und Umsetzung der letzten notwendigen Schritte, um bis 2026 eine europäische Pioniermission auf Basis eines kundenorientierten Ansatzes zu fliegen.
Thales Alenia Space verfolgt gemeinsam mit GMV, DLR und 14 europäischen Technologieanbietern (Forschungszentren, große, mittlere und kleine Unternehmen, darunter ein Start-up) den Plan, bis 2026 einen Mehrzweck-Service für LEO- und GEO-Satelliten zu kommerzialisieren. Dieses Projekt ist ein wichtiger Schritt, um den ersten Schritt auf den Markt zu machen.



{kind=link}