
ROKVISS – Überprüfung von Robotik-Komponenten auf der ISS
2010-11-15 ROKVISS schließt seine sehr erfolgreiche Mission ab.
Für Publikationen und Videos (siehe ROKVISS Results)
System und Experimentbeschreibung
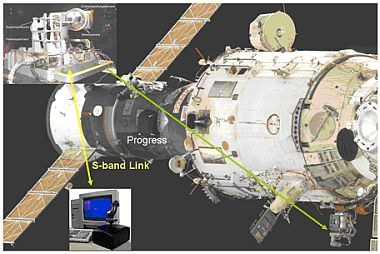
Das jüngste deutsche Weltraumroboterprojekt ROKVISS wurde am 24. Dezember 2004 erfolgreich vom Kosmodrom Baikonur gestartet. Während eines Weltraumspaziergangs am 26. Januar 2005 wurde die Hardware des ROKVISS-Experiments an der Außenwand des russischen Svesda-Moduls montiert.

NASA
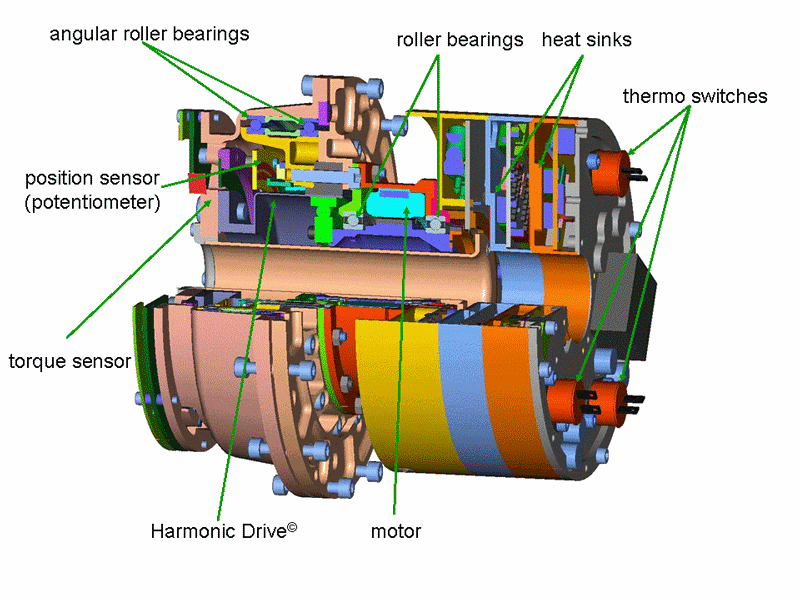
ROKVISS zielt auf die Qualifizierung der neuesten, im DLR-Labor entwickelten Leichtbau-Robotergelenktechnologien ab. Sie bilden die Grundlage für eine neue Generation ultraleichter, impedanzkontrollierbarer und weicher Arme, die zusammen mit den neuesten gelenkigen 4-Finger-Händen des DLR die wesentlichen Komponenten für zukünftige Roboautensysteme darstellen.
Der Fokus des DLR auf die Weltraumrobotik wurde von starken Überlegungen angetrieben, wie man Robotertechnologien für Weltraumanwendungen vorantreiben kann. Es wurde eine neue Generation von Leichtbaurobotern mit einem unschlagbaren Verhältnis von Gewicht zu Last sowie beeindruckenden Steuerungsfunktionen entwickelt, die das System einfach zu bedienen und sicher für terrestrische Wartungsanwendungen machen. Um all diese neuen Technologien im Weltraum zu testen und zu verifizieren, wurde kürzlich das ROKVISS (RObot Komponent Verification on ISS) Experiment ins Leben gerufen. Die Hauptziele des ROKVISS-Experiments sind die Demonstration und Verifizierung von leichtgewichtigen Robotikkomponenten unter realistischen Missionsbedingungen im freien Weltraum sowie die Verifizierung der direkten Telemanipulation, um die Machbarkeit der Anwendung von Telepräsenzmethoden für weitere Satellitenwartungsaufgaben zu zeigen.
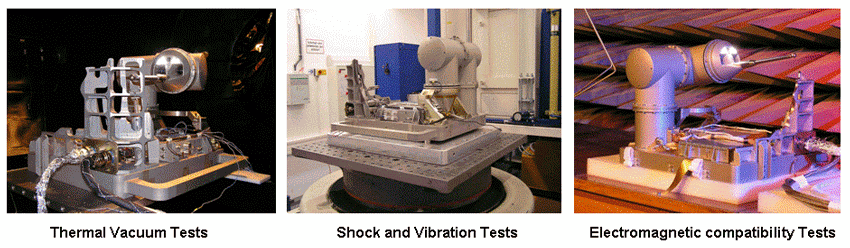
Eine Grundidee des ROKVISS-Projekts war es, sperrige und teure Radhard-Komponenten für eine weltraumtaugliche Anwendung zugunsten von hochintegrierten Schaltkreisen, die bei terrestrischen Geräten verwendet werden, loszuwerden. Um zu einer ersten Einschätzung der Anwendbarkeit der Gelenkmechatronik für den freien Raum zu kommen, haben wir einen Strahlungs-, einen EMV- und einen thermischen Test mit einem der vorhandenen Gelenke durchgeführt. Die Ergebnisse all dieser Tests waren sehr überzeugend, es konnte kein prinzipielles Problem festgestellt werden.
Trotz dieser ermutigenden Testergebnisse war es klar, dass eine Art Umgestaltung vorgenommen werden musste.
- Austausch des Kreuzrollenlagers gegen zwei SchrägrollenlagerAustausch aller Elektrolytkondensatoren gegen Tantalkondensatoren
- Der Getriebeausgangspositionssensor der Firma Netzer war nicht verfügbar, daher wurde ein auf Potentiometer basierendes Positionsmesssystem entwickelt
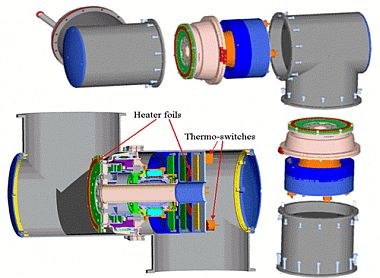
- Alle wärmeproduzierenden elektronischen Teile müssen thermisch mit der Struktur des Roboters gekoppelt werden, um eine Wärmeableitung zu ermöglichen
- Die optische SERCOS-Busringtopologie wurde in eine Punkt-zu-Punkt-Verbindung über Kupferdrähte geändert.
- Jedes Gelenk ist über SERCOS mit dem Hauptrechner (OBC) gekoppelt. Der Vorteil der Punkt-zu-Punkt-Struktur besteht darin, dass selbst bei einem Ausfall der Elektronik eines Gelenks das verbleibende Gelenk noch funktionsfähig ist.
- Es musste eine gegen Verriegelung geschützte Stromversorgungsschaltung implementiert werden.
- Es werden elektronische Bauteile mit erweitertem Temperaturbereich (-45 C bis +85 C) verwendet.
{kind=link}
{kind=link}
Allgemeine Experimentbeschreibungen
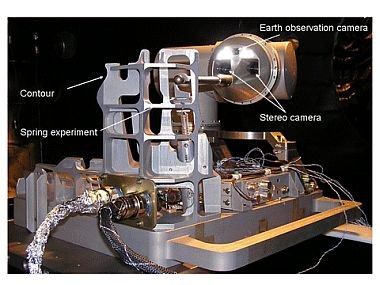
Das ROKVISS-Experiment besteht aus einem kleinen Roboter mit zwei Gelenken, der auf einer universellen Arbeitsplatte (UWP) montiert ist, einer Steuerung, einem Beleuchtungssystem, einer Stromversorgung und einem mechanischen Konturgerät zur Überprüfung der Funktionen und der Leistung des Roboters. Diese beiden Robotergelenke werden für den weiteren Einsatz im freien Raum getestet, indem sie wiederholt vordefinierte Roboteraufgaben in einem automatischen Modus, d.h. ohne direkte Interaktion des Bedieners, ausführen. Von vornherein definierte Gelenktrajektorien werden dann an das Bordsystem gesendet und autonom ausgeführt.
Für die Telepräsenz-Demonstration wird eine Stereokamera am 2. Gelenk montiert: Die Videobilder werden zusammen mit den aktuellen Gelenk- und Drehmomentwerten des Roboters als aktuelle Situation an einen Operator in der DLR-Bodenstation zurückgemeldet. Der Operator steuert den ROKVISS-Roboter über ein Force-Feedback-Steuergerät. Es werden Kraft- und Positionsbefehle erzeugt, um die Robotergelenke in den gewünschten Zustand zu bringen. Durch die Verwendung von hochratigen Up- und Downlink-Kanälen wird der Bediener direkt in den Regelkreis eingebunden. Entscheidende Faktoren für ein qualitativ hochwertiges Eintauchen des Bedieners in die entfernte Szenerie sind eine hohe Datenrate, geringe Latenz und jitterfreie Kraft-/Positionsdaten sowie eine angemessen gute und aktuelle stereoskopische Videoübertragung.
Die Stereobilder einer Stereovideokamera, die am letzten Gelenk des Roboters angebracht ist, werden zusammen mit den gemessenen Gelenkpositionen und aktuellen Gelenkmomenten an die Bodenstation übertragen. Der Roboter empfängt seine Bewegungsbefehle von der Bodenstation in Echtzeit über eine S-Band-Kommunikationsverbindung. Der Roboter wird im automatischen Modus und im Telepräsenzmodus betrieben. Der Telepräsenzmodus kann bis zu sieben Minuten lang während der Phase des direkten Funkkontakts genutzt werden, wenn das System die Trackingstation in Deutschland (German Space Operation Center, GSOC) überfliegt. Eine wichtige Voraussetzung für diesen Modus ist, dass die Gesamtdauer der Datenübermittlung deutlich unter 500 Millisekunden liegt (die tatsächliche Dauer der Übermittlung liegt bei ROKVISS unter 20 ms). Im automatischen Modus durchläuft das System ausgewählte, vordefinierte Bewegungsabläufe. Die gemessenen Gelenkdaten werden an Bord gespeichert und während der nächsten Funkkontaktphase an den Boden übertragen.
Wissenschaftliche Ziele
Die Hauptelemente des ROKVISS-Experiments sind die beiden leichtgewichtigen Robotergelenke, die für weitere Missionen unter freien Weltraumbedingungen getestet und verifiziert werden sollen. Die meiste Zeit des ROKVISS-Experiments wird darauf verwendet werden, die Robotergelenke in Dauerbetrieb zu nehmen, um alle interessanten Daten für die weitere Analyse am Boden aufzuzeichnen.
Bei Reparatur- und Wartungsarbeiten an Satelliten ist die direkte Einbeziehung eines menschlichen Bedieners in den Kontrollkreislauf unumgänglich, da solche Einsätze nicht detailliert offline am Boden vorbereitet werden können. Daher muss ein Tele-Operationsmodus vorgesehen werden, der dem Bediener das Gefühl gibt, die Aufgabe direkt am entfernten Standort zu erledigen. Insbesondere für den Betrieb in geosynchronen Umlaufbahnen könnte dieser Telepräsenzmodus aufgrund des unbegrenzten Funkkontakts rund um die Uhr eingesetzt werden. Ein solcher klassischer Master-Slave-Telebetrieb hat den Vorteil, dass der Aufwand für H/W und S/W an Bord minimiert wird. Andererseits werden sehr hohe Anforderungen an die Datenkommunikation gestellt, sowohl was den Jitter der Datenübertragung als auch die gesamte Round-Trip-Zeit betrifft.
Experimente im Tele-Präsenz-Modus
Wie bereits erwähnt, ist für alle Anwendungen der Weltraumrobotik, die im Bereich der Wartung vorstellbar sind, die direkte Einbeziehung eines menschlichen Bedieners in den Kontrollkreislauf unvermeidlich, da solche Missionen nicht in aller Tiefe offline am Boden vorbereitet werden können. Daher muss ein Telepräsenzmodus vorgesehen werden, der dem Bediener ein immersives Gefühl vermittelt, um die Aufgabe unmittelbar am entfernten Standort zu erledigen. Das größte Problem ist die Zeitverzögerung zwischen der Befehlsgenerierung am Boden und dem Eintreffen der Rückmeldedaten vom entfernten Robotersystem. Es wurden bereits viele Versuche unternommen, diese Probleme zu kompensieren oder zu überwinden. Modellbasierte Ansätze, z.B. mit Hilfe von prädiktiven Grafiken, sind sehr hilfreich, wenn ein genaues geometrisches und dynamisches Modell der entfernten Umgebung existiert. Signalbasierte Methoden können mit unterschiedlichen Zeitverzögerungen umgehen. Um eine gute Immersion zu erreichen, ist es jedoch am besten, die Zeitverzögerung zu reduzieren und mögliche Jitter bei der Datenübertragung zu beseitigen.
Bei der Telepräsenz-Demonstration steuert der Bediener den Slave-Roboter am entfernten Standort über ein Force-Feedback-Steuergerät. Kraft- und Positionsbefehle werden erzeugt, um die Robotergelenke in den gewünschten Zustand zu versetzen. Durch die Verwendung von hochratigen Up- und Downlink-Kanälen mit geringer Latenz und Jitter wird der Bediener "immersiv" in den Kontrollkreislauf einbezogen. Eine wichtige Voraussetzung für diesen Modus ist, dass die Gesamtverzögerung der Datenübertragung deutlich unter 500 Millisekunden bleibt. In der Tat haben wir für die ROKVISS-Direktüberflug-Situation nur 15-20ms Roundtrip-Verzögerung gemessen, aber wir werden auch zusätzliche Zeitverzögerungen einführen, um den Telepräsenzbetrieb über einen geostationären Kommunikationssatelliten zu simulieren.
Während große und variierende Zeitverzögerungen durch modellbasierte Ansätze kompensiert werden können, z.B. durch prädiktive Simulation (wie in ROTEX demonstriert), werden wir eine starke signalbasierte Kopplung zwischen dem Bodenoperator und dem Weltraumroboter haben. Zunächst wird die Kraftrückkopplungsschleife mit einer gemeinsamen Positions-/Kraftkontrollstruktur realisiert. Um mit längeren und variierenden Zeitverzögerungen fertig zu werden, werden ausgeklügelte bilaterale Kontrollstrukturen verwendet.
Die auf der ROKVISS-Grundplatte montierte Evaluierungskontur wird zur Überprüfung der Telepräsenz-Kontrollsysteme unter realistischen Missionsbedingungen verwendet.
- Die Kontur stellt eine harte Oberfläche dar, die mit dem Stift berührt werden kann.Verschiedene geometrische Formen sind für die Konturverfolgung vorgesehen.
- Ein 2 DoF "Peg in Hole"-Teil realisiert eine mechanische Erfassung des Stiftes in 3 Richtungen.Mechanische Federn simulieren einen externen Energiespeicher, der dem Master-Slave-System Energie zuführen kann.
- Eine virtuelle Feder ist in die Robotergelenke programmiert, um verschiedene Oberflächensteifigkeiten zu emulieren.
- Der Bediener muss einem genau definierten virtuellen Pfad folgen, der auf dem Videobildschirm eingeblendet wird. Während er diese Aufgabe ausführt, wird der Roboter mit Hilfe des "Peg in Hole"-Teils an seiner Position fixiert.
- Die Differenz zwischen der gemessenen und der befohlenen Roboterposition stellt die Rückkopplungskraft dar.
Experimente im Tele-Roboter-Modus
Bei direktem Funkkontakt kann das ferngesteuerte Robotersystem von einem Bediener über die Kontrolltechniken, die in der Mensch-Maschine-Schnittstelle (MMI) der MARCO-Tele-Roboter-Bodenstation realisiert sind, kommandiert werden. Das Feedback wird über das bordeigene Kamerasystem und die Telemetriedaten geliefert. Alle kraftgesteuerten Aufgaben können ausgeführt werden, indem ein vordefinierter Pfad an das bordeigene System gesendet wird. Im Gegensatz zu den Experimenten im automatischen Modus (unten) werden diese Experimente durch direkte Interaktion mit dem Bediener durchgeführt. Das bedeutet, dass alle im folgenden Abschnitt beschriebenen Experimente, die die Verbindungszeit nicht überschreiten, auch im tele-robotischen Modus durchgeführt werden können.
Experimente im automatischen Modus
Die Hauptzwecke der Experimente im automatischen Modus, die über die Missionszeitleiste mehrmals automatisch aktiviert werden, sind:
- die langfristige Verifizierung des Verhaltens des Gelenks während des Betriebs im freien Weltraum
- die Identifizierung der dynamischen Parameter unter freien Weltraumbedingungen.
Diese Experimente sind ein sehr gutes Mittel, um vergleichbare Datensätze der Gelenkparameter zu erhalten. Die Experimentdaten (Roboterpfade und Steuerungsmodi) werden vor ihrer Ausführung hochgeladen. Die Experimente im Automatikmodus werden automatisch über die Missionszeitleiste aktiviert, unabhängig vom direkten RF-Kontakt. Alle gemessenen Gelenkparameter werden auf dem On-Board-Speichergerät gespeichert und bei Bedarf während der nächsten Funkkontaktphase heruntergeladen.
Die folgenden Experimente werden durchgeführt:
- Vordefinierte Trajektorien ohne Kraftkontakt, um das Verhalten des Gelenks im berührungslosen Betrieb zu testen.
- Vordefinierte Trajektorien mit Kraftkontakt, d.h. Konturverfolgung oder Bewegung gegen eine Federlast (Kraftkontrolle, kartesische Impedanzkontrolle).
- Vordefinierte Trajektorien mit einem Wechsel vom berührungslosen Zustand zum Kontaktzustand (Kontaktdynamik-Experiment).
Identifizierung dynamischer Parameter
Das dynamische Verhalten der Bewegungssimulation von Robotern und damit die operative Gesamtleistung hängt in hohem Maße von der Gültigkeit und Zuverlässigkeit der zugrunde liegenden dynamischen Modelle ab. In der Mikrogravitation und der lebensfeindlichen Umgebung des Weltraums unterscheidet sich das dynamische Verhalten von Robotermanipulatoren erheblich von ihrem Verhalten am Boden. Daher werden dynamische Daten während des Fluges benötigt, um die mathematischen Modelle zu aktualisieren und zu validieren und um das Vertrauen in den Modellierungsprozess zu erhöhen, insbesondere bei fortgeschrittenen Wartungsmissionen.
Um die Sicherheit in den dynamischen Modellierungsprozess und in bodengestützte Simulationen zu erhöhen, ist die richtige Kenntnis der Systemparameter, insbesondere bei der nichtlinearen gemeinsamen Dynamik, sehr wichtig. Daher nutzen wir ROKVISS auch als Testumgebung im Orbit, um Methoden zur Identifizierung dynamischer Parameter zu überprüfen und die unbekannten Parameter in situ zu identifizieren. ROKVISS bietet eine hervorragende Gelegenheit, diese Lücke zu schließen.
Sowohl für die Entwicklungs- und Testphase vor der Mission als auch für die abschließende Betriebsphase während des Fluges sind genaue dynamische Modelle erforderlich, um die erwartete Leistung des Manipulators in der Mikrogravitationsumgebung zu garantieren. Die Auswirkungen der stark reduzierten Schwerkraft und der Temperaturschwankungen sowie die zu erwartenden Änderungen der physikalischen Parameter aufgrund von Materialverschleiß wirken sich stark auf die korrekte Modellierung des nichtlinearen dynamischen Verhaltens der Gelenke (Harmonic Drive Getriebe) aus. Dies beeinflusst insbesondere Effekte wie Reibung, Steifigkeit und Steuerung. Die Identifizierung von Systemparametern während des Fluges und die Validierung des dynamischen Modells sind daher eine Voraussetzung, um mehr Vertrauen in den Modellierungsprozess zu gewinnen.
Die Ziele der technologischen Experimente sind:
- wichtige dynamische, nichtlineare Systemparameter in der Mikrogravitationsumgebung zu identifizieren und die zugrunde liegenden Mehrkörpersystemmodelle zu validieren
- um die Modellierungstreue und damit die Leistungsqualität für zukünftige Robotermissionen in erdnahen und geostationären Umlaufbahnen oder anderen weltraumgestützten Roboterplattformen zu erhöhen.
Gemeinsame Identifizierung von Parametern
Für den Entwurf der Gelenksteuerung für die DLR-Leichtbau-Gelenke (Positions-, Drehmoment- und Impedanzsteuerung) wurden effiziente und zuverlässige autonome Offline-Identifikationsmethoden entwickelt, die die Steifigkeit und Dämpfung sowie die Reibungsparameter liefern. Diese Identifizierungsmethoden werden für die Schätzung von Parametern für die Entwicklung von Steuerungen während der Mission verwendet. Ausgehend von dem Modell und den entsprechenden Identifizierungsmessungen wurde ein modifiziertes, zeiteffizientes Online-Identifizierungsverfahren auf der Grundlage von Algorithmen der rekursiven kleinsten Quadrate erfolgreich am Boden getestet und wird für die Identifizierung verwendet werden.
Experiment zur Kontaktdynamik
Die kanadische Weltraumbehörde (CSA) nutzt die ROKVISS-Anlage an Bord der ISS, um zu untersuchen, wie die Weltraumumgebung das Verhalten von Körpern beeinflusst, die in einer Kontaktsituation zusammenwirken. Im Einzelnen sieht das Projekt folgende Messungen vor
- die Energiedissipation, die bei intermittierenden Aufprallereignissen auftritt
- die Reibungskräfte, die zwischen zwei Körpern wirken, während sie sich in einer dauerhaften Kontaktsituation gegeneinander bewegen.
Anhand von drei verschiedenen Umgebungen wird untersucht, wie die Weltraumumgebung die Parameter des Kontaktmodells beeinflusst:
- Auf der Erde führen Sie unter atmosphärischen Standardbedingungen mit dem ROKVISS Backup- oder Engineering-System eine Reihe von Kontaktaufgaben durch.
- In einer thermischen Vakuumkammer mit Hilfe eines speziellen Geräts, das die Reibungskoeffizienten sehr genau messen kann. Die Experimente werden bei verschiedenen Temperaturen durchgeführt, die von atmosphärischen Standardbedingungen bis hin zu weltraumähnlichen Bedingungen reichen
- An Bord der ISS führen Sie das gleiche Experiment wie auf der Erde durch.
Für Publikationen und Videos siehe ROKVISS Results