
Fünf Jahre im All: DLR-Roboterarm beendet ISS-Mission mit großem Erfolg

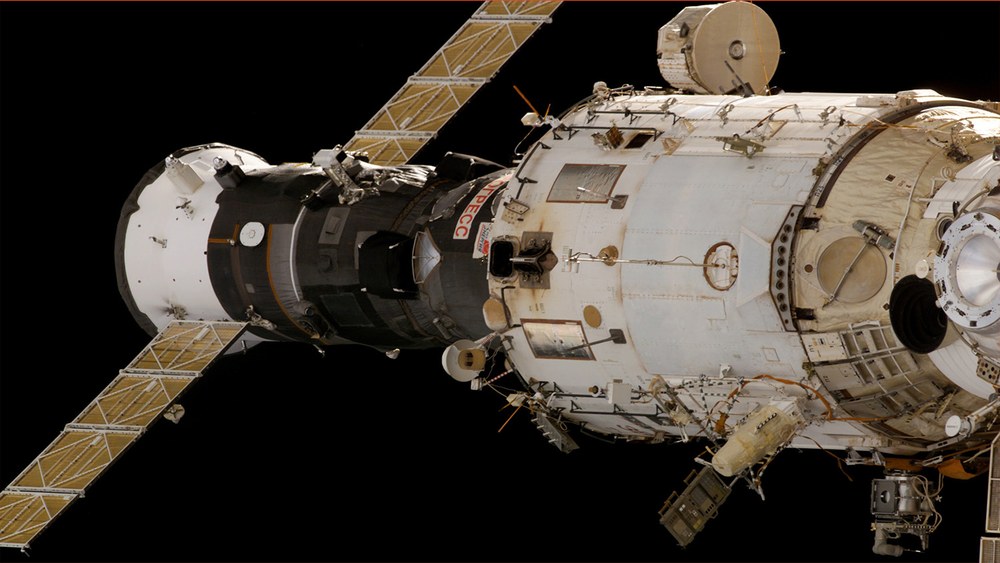
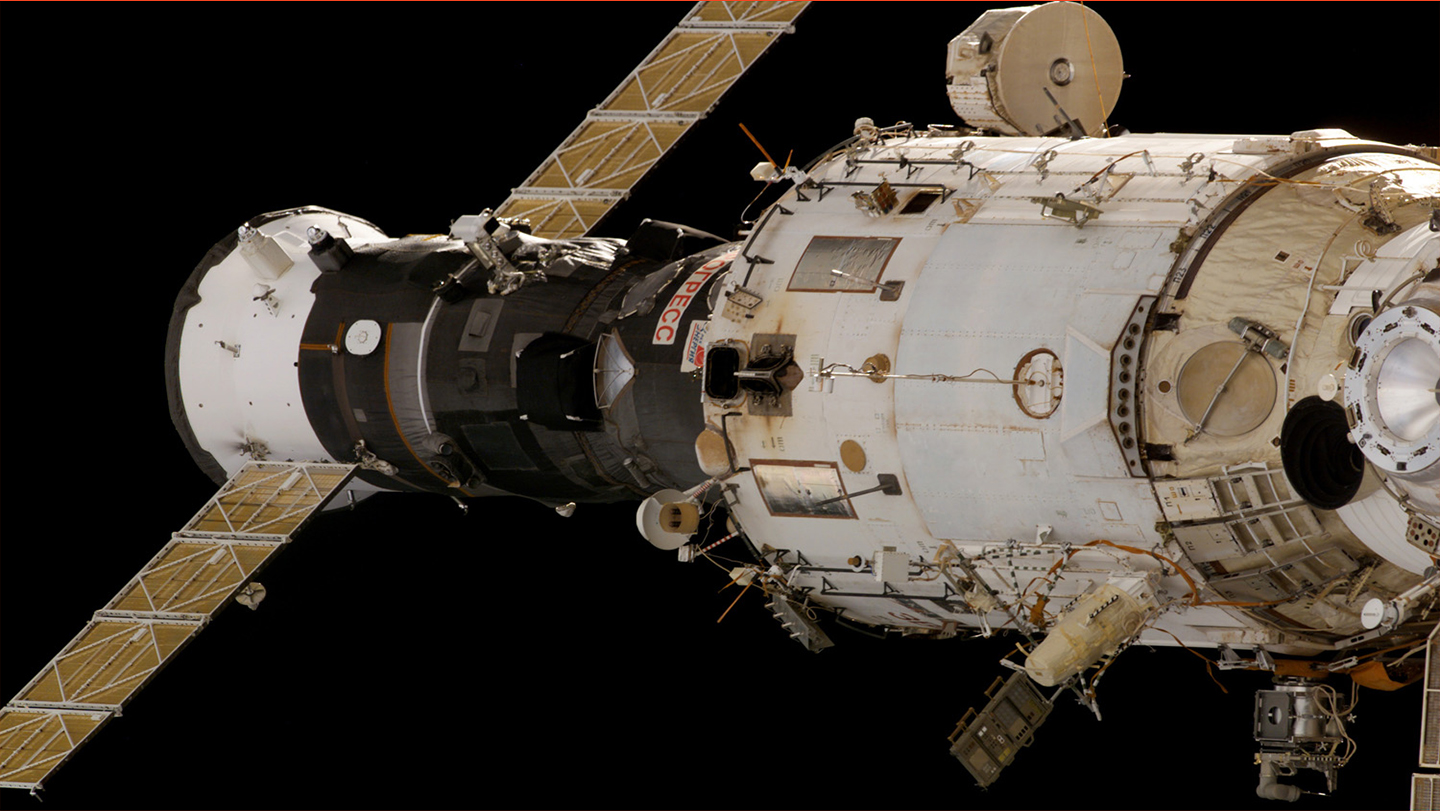
Das erste deutsche Robotik-Experiment im freien Weltraum ist zu Ende: Am Abend des 15. November 2010 haben russische Kosmonauten bei einem Außenbordeinsatz den vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelten robotischen Arm ROKVISS (RObotik-Komponenten-Verifikation auf der ISS) vom russischen Service-Modul Swesda auf der Internationalen Raumstation demontiert und ins Innere der ISS gebracht. Bereits am 2. November 2010 hat das ROKVISS-Team vom DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen den Roboterarm in die dafür notwendige Position gefahren, damit ROKVISS problemlos durch die Luftschleuse ins Innere der ISS transportiert werden konnte.
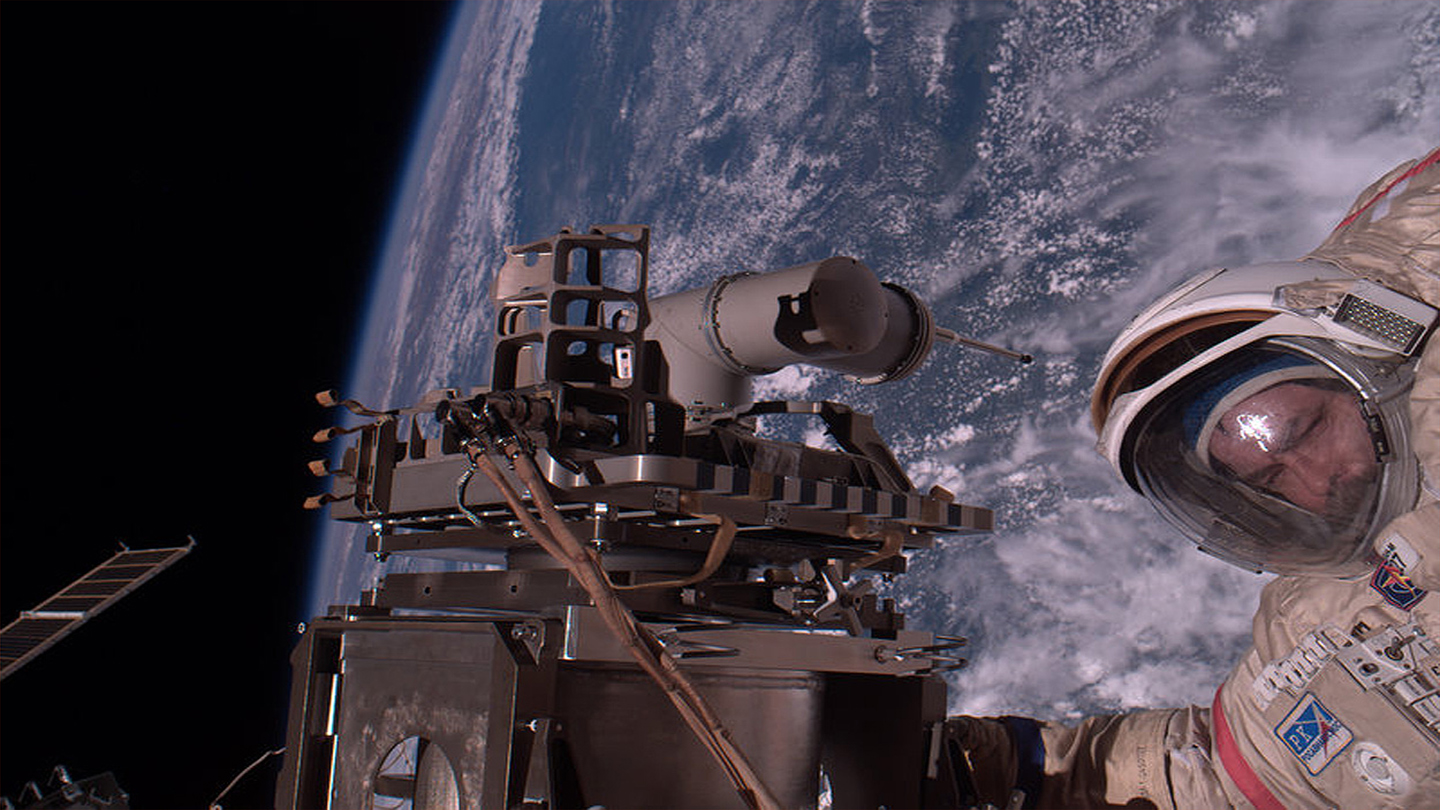
Fünfeinhalb Jahre lang - vom 22. März 2005 bis zum 2. November 2010 - wurde der 50 Zentimeter große und sieben Kilogramm schwere robotische Arm im Weltraum betrieben und hat dabei rund 500 Tests erfolgreich absolviert. Mit seinen zwei Gelenken und einem Metallfinger führte ROKVISS präzise Arbeiten im All aus.
Vier bis sechs Kontakte im Monat
{kind=link}
{kind=link}
Gesteuert wurde das Technologie-Experiment abwechselnd vollautomatisch und im sogenannten Telepräsenzbetrieb vom ROKVISS-Projektteam des DLR in Oberpfaffenhofen. Vier bis sechs Mal pro Monat hatten die Wissenschaftler dazu mit dem Roboterarm Kontakt - immer dann, wenn die ISS den Empfangsbereich der Antennenanlage des Deutschen Raumfahrtkontrollzentrums in Weilheim südwestlich von München durchkreuzte und damit ein Datentransfer möglich war. "Wir haben zum Beispiel getestet, wie präzise sich der Roboterarm mit einem Joystick mit sogenannter Kraftrückmeldung an der ISS steuern lässt. Dabei spürt der Bediener am Boden die Kraft, mit der der Roboter im Weltraum gegen seine Umgebung drückt", berichtet Projektleiter Klaus Landzettel. Darüber hinaus untersuchten die Ingenieure auch, welche Energie ROKVISS bei der Bewegung aufnimmt und wie sich die Reibung der Lager und Getriebe über längere Betriebszeiten im freien Weltraum verhält. Zwei integrierte Kameras dokumentierten die Tests. Ihre Aufnahmen wurden in Echtzeit in den Kontrollraum übertragen und vermittelten den DLR-Wissenschaftlern einen realen Eindruck vom Zustand und der Funktionsweise des Experiments.
Gefahren im freien Weltraum getrotzt
Ziel des in Deutschland geplanten und entwickelten Projekts war es, neue Roboterhardware und leistungsfähige Steuerungskonzepte im realen Missionsbetrieb zu testen und zu verifizieren. Künftig soll diese Technologie Astronauten bei komplizierten Arbeiten im All unterstützen und entlasten. Sie wird aber auch helfen, Satelliten im Weltraum zu reparieren. Im Universum herrschen grundlegend andere Bedingungen als auf der Erde. Es gibt keine Luft und keine Schwerkraft. Die Temperaturen in den Robotergelenken schwankten zwischen minus 20 Grad und plus 60 Grad Celsius.
Eine weitere Herausforderung war die radioaktive


{kind=link}
Strahlung: "Durch den häufigen Ionenbeschuss durften keine Elektronikbauteile zerstört werden. Die ROKVISS-Gelenke enthalten mehrere Computer, die zerstört werden können, wenn die Elektronik von Protonen getroffen wird", verdeutlicht DLR-Wissenschaftler Landzettel. Deshalb gibt es in den Gelenkmodulen ein System, das dafür sorgt, dass im Moment des Kurzschlusses die Stromversorgung automatisch abgeschaltet und die gespeicherte Energie vernichtet wird. Auch diese Schutzschaltung hat zuverlässig funktioniert.
Mit der Demontage auf der ISS ist für die DLR-Wissenschaftler das ROKVISS-Projekt aber noch nicht abgeschlossen: Bis März 2011 sollen die beiden Gelenkeinheiten im Inneren der ISS von der Bodenplatte abgeschraubt und die Kameraeinheit demontiert werden. Denn nur so passen die Gelenke in den kleinen Stauraum der russischen Sojus-Kapsel, in der die Gelenke dann zur Erde zurückkehren sollen. Ende April 2011 rechnen Projektleiter Klaus Landzettel und seine Kollegen damit, das ROKVISS wieder im DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen sein wird. Dann werden die Wissenschaftler anhand des Verschleißzustandes weitere essenzielle Informationen für den Bau künftiger Weltraum-Roboter ermitteln können.
Finanziert wurde das 11,5 Millionen-Euro-Experiment vom DLR mit Mitteln des Bundesministeriums für Bildung und Forschung. Das DLR-Institut für Robotik und Mechatronik entwickelte und baute die Robotik-Komponenten, die EADS Astrium GmbH in Bremen, das Münchener Unternehmen Kayser-Threde und die russische Raumfahrtagentur ROSKOSMOS beteiligten sich an Herstellung und Entwicklung weiterer Komponenten sowie der Durchführung der Mission.