
Autonome 3D-Modellierung


{kind=link}
In der Robotik werden komplette Objekt- oder Umgebungsmodelle für die Lokalisierung, Objekterkennung, oder Manipulation benötigt. Heutzutage werden 3D-Modelle in der Regel durch manuelle Abtastung erstellt, was für den Anwender eine langwierige und zeitraubende Aufgabe darstellt. Daher ist ein Robotersystem, das in der Lage ist 3D-Modelle von unbekannten Objekten oder Szenen autonom zu generieren, sehr vorteilhaft. Die autonome 3D Objektmodellierung wird ermöglicht durch iterative Planung von Next-Best-Views und kollisionsfreien Bahnen bis zu dem Zeitpunkt an dem das 3D Modell möglichst komplett ist.
Am RMC wurden Next-Best-View Planungsmethoden für autonome Objektmodellierung mit einem Industrieroboter und einem Laserscanner entwickelt [3]. Für eine effiziente Modellierung, werden die 3D-Modelle in Echtzeit erzeugt, Scanpfadkandidaten mit Hilfe einer Grenzflächensuche und Trendschätzung der Oberfläche des erworbenen Modells ermittelt und ein Next-Best-Scan auf Basis von Informationsgewinn des unexplorierten Raumes als auch der Qualität des Oberflächenmodells geplant.
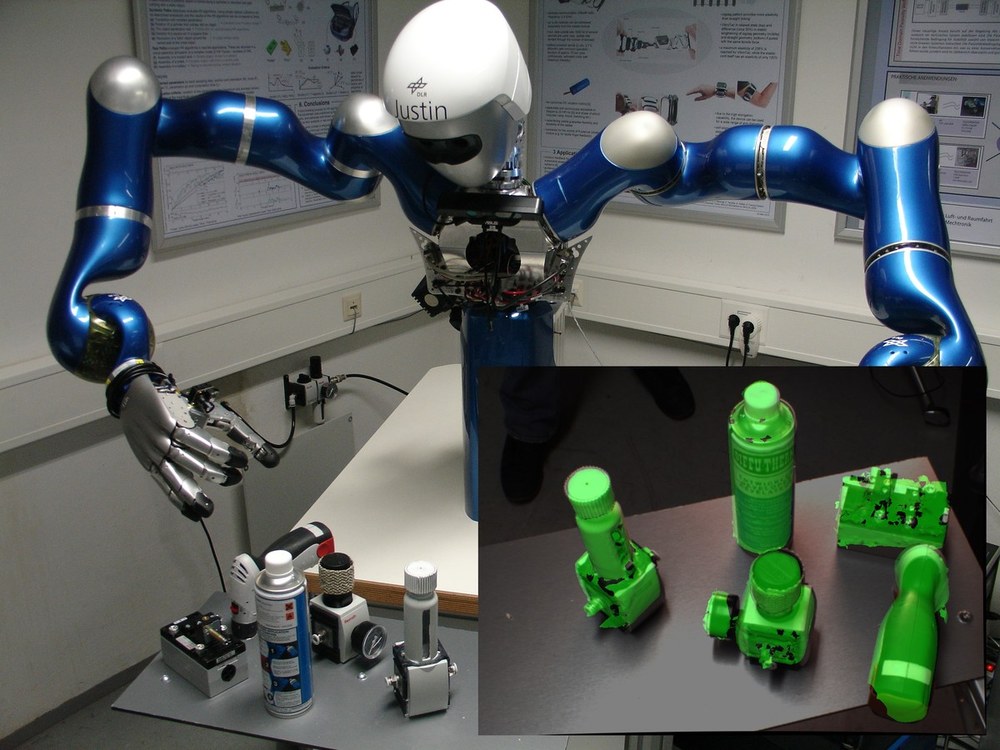
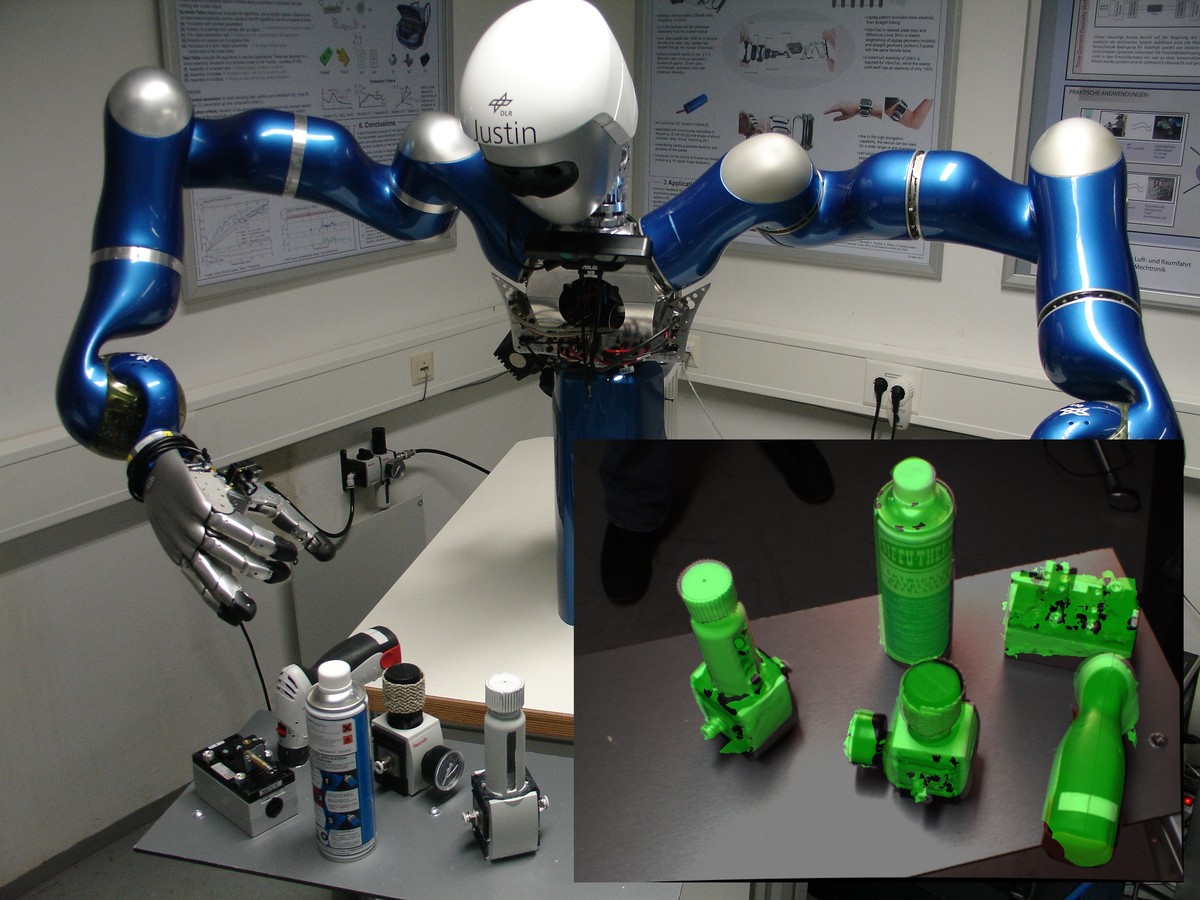
Weiterhin werden die Verfahren zur aktiven Szenenexploration angewandt [2]. Aktive Szenenexploration erfordert Objekterkennungsmethoden zur Analyse einer Szene mit teilweise bekannten Objekten, sowie Explorationsansätze für die autonome Modellierung von unbekannten Objekten. Dabei wird die Next-Best-View Planung sowohl für die Lageschätzung als auch für die Exploration von nicht passenden Daten angewendet. Die 3D-Objektmodelle werden zu einer Objektdatenbank hinzugefügt, die dann direkt von der Objektlageschätzung verwendet werden kann, auf dem gleichen oder auch einem anderen Robotersystem.
Darüber hinaus wurde die autonome Modellierung von Arbeitstationen mithilfe eines mobilen Roboters in industriellen Produktionsumgebungen untersucht. Der Roboter exploriert zunächst die unbekannte Umgebung und erstellt ein 3D Szenenmodell, das zur kollisionsfreie Bahnplanung von Pick & Place Operationen mit dem Roboterarm verwendet wird.
Ausgewählte Veröffentlichungen
[1] Christian Rink and Simon Kriegel. "Streaming Monte Carlo Pose Estimation for Autonomous Object Modeling", In Proceedings of 13th Conference on Computer and Robot Vision CRV, Victoria, Canada, June 2016. [PDF] [BibTex]
[2] Simon Kriegel "Autonomous 3D Modeling of Unknown Objects for Active Scene Exploration", Dissertation, Technische Universität München (TUM), 2015. [BibTex] [PDF]
[3] Simon Kriegel, Christian Rink, Tim Bodenmüller and Michael Suppa. "Efficient Next-Best-Scan Planning for Autonomous 3D Surface Reconstruction of Unknown Objects", Journal of Real-Time Image Processing: Special Issue on Robot Vision, vol. 10, no. 4, pages 611-631, 2015. [BibTeX] [PDF] [SpringerLink]
[4] Simon Kriegel, Manuel Brucker, Zoltan-Csaba Marton, Tim Bodenmüller, and Michael Suppa. "Combining Object Modeling and Recognition for Active Scene Exploration", In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems IROS, pages 2384-2391, Tokyo, Japan, November 2013. [BibTeX] [PDF] [IEEEXplore]