
Autonomous 3D Modeling


{kind=link}
In robotics, usually complete object or environment models are required for localization, object recognition, or manipulation. Nowadays, 3D models are usually obtained by hand-guided scanning which is very tedious and time consuming task for the human operator. Therefore, a robotic system which is able to autonomously acquire 3D models of unknown objects or scenes is highly beneficial. This can be achieved by iteratively planning Next-Best-Views and collision-free motions until the desired model quality is reached.
At the RMC, view planning methods for autonomous object modeling with an industrial robot and a laser striper have been developed as presented in [3]. For efficient modeling, 3D models are generated in a real-time stream, scan path candidates are determined based on a surface trend estimation of boundaries in the acquired model, and a Next-Best-Scan based on information gain of the unexplored space and quality of the surface model is planned.
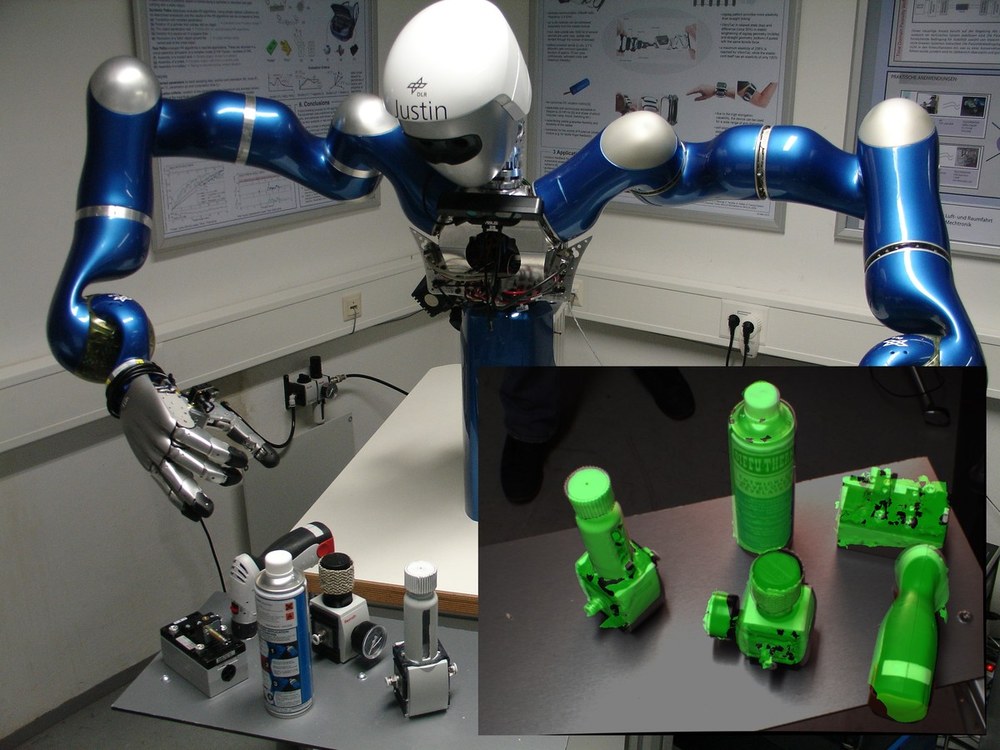
Furthermore, the presented methods are applied for active scene exploration as presented in [2]. Active scene exploration combines object recognition methods for analyzing a scene of partially known objects as well as exploration approaches for autonomous modeling of unknown objects. Thereby, Next-Best-View planning is applied for accurate pose estimation and exploration of unmatchable data. The 3D object models are added to an object database which can then directly be utilized for object pose estimation on the same or different robot system.
Moreover, the autonomous modeling of workspace scenes in industrial production environments allowing for collision-free motion planning has been investigated. Therefore, a mobile robot explores the initially unknown environment and creates a 3D scene model which is utilized for planning pick and place operations with the robotic arm.
Selected Publications
[1] Christian Rink and Simon Kriegel. "Streaming Monte Carlo Pose Estimation for Autonomous Object Modeling", In Proceedings of 13th Conference on Computer and Robot Vision CRV, Victoria, Canada, June 2016. [PDF] [BibTex]
[2] Simon Kriegel "Autonomous 3D Modeling of Unknown Objects for Active Scene Exploration", Dissertation, Technische Universität München (TUM), 2015. [BibTex] [PDF]
[3] Simon Kriegel, Christian Rink, Tim Bodenmüller and Michael Suppa. "Efficient Next-Best-Scan Planning for Autonomous 3D Surface Reconstruction of Unknown Objects", Journal of Real-Time Image Processing: Special Issue on Robot Vision, vol. 10, no. 4, pages 611-631, 2015. [BibTeX] [PDF] [SpringerLink]
[4] Simon Kriegel, Manuel Brucker, Zoltan-Csaba Marton, Tim Bodenmüller, and Michael Suppa. "Combining Object Modeling and Recognition for Active Scene Exploration", In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems IROS, pages 2384-2391, Tokyo, Japan, November 2013. [BibTeX] [PDF] [IEEEXplore]