
Formanalyse
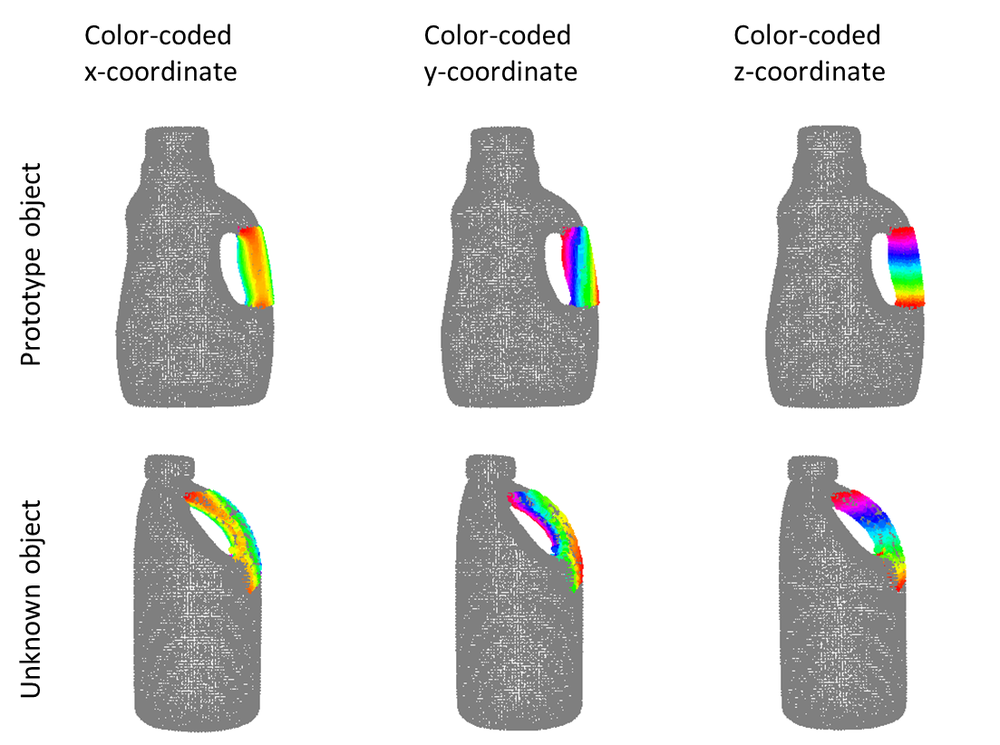

Objektteile mit spezieller funktionaler Relevanz können durch eine geeignete Verformung von Prototypen an neuen Objekten detektiert werden. Sie können sogar im Detail in Beziehung gesetzt werden zu einem bekannten Beispielfall. Im Bild sind geschätzte Punktkorrespondenzen zwischen den Griffen an zwei unterschiedlichen Putzmittelflaschen mit gleicher Farbe gekennzeichnet; der Farbverlauf ist gemäß den kartesischen Koordinaten im Prototypensystem.
Credit:
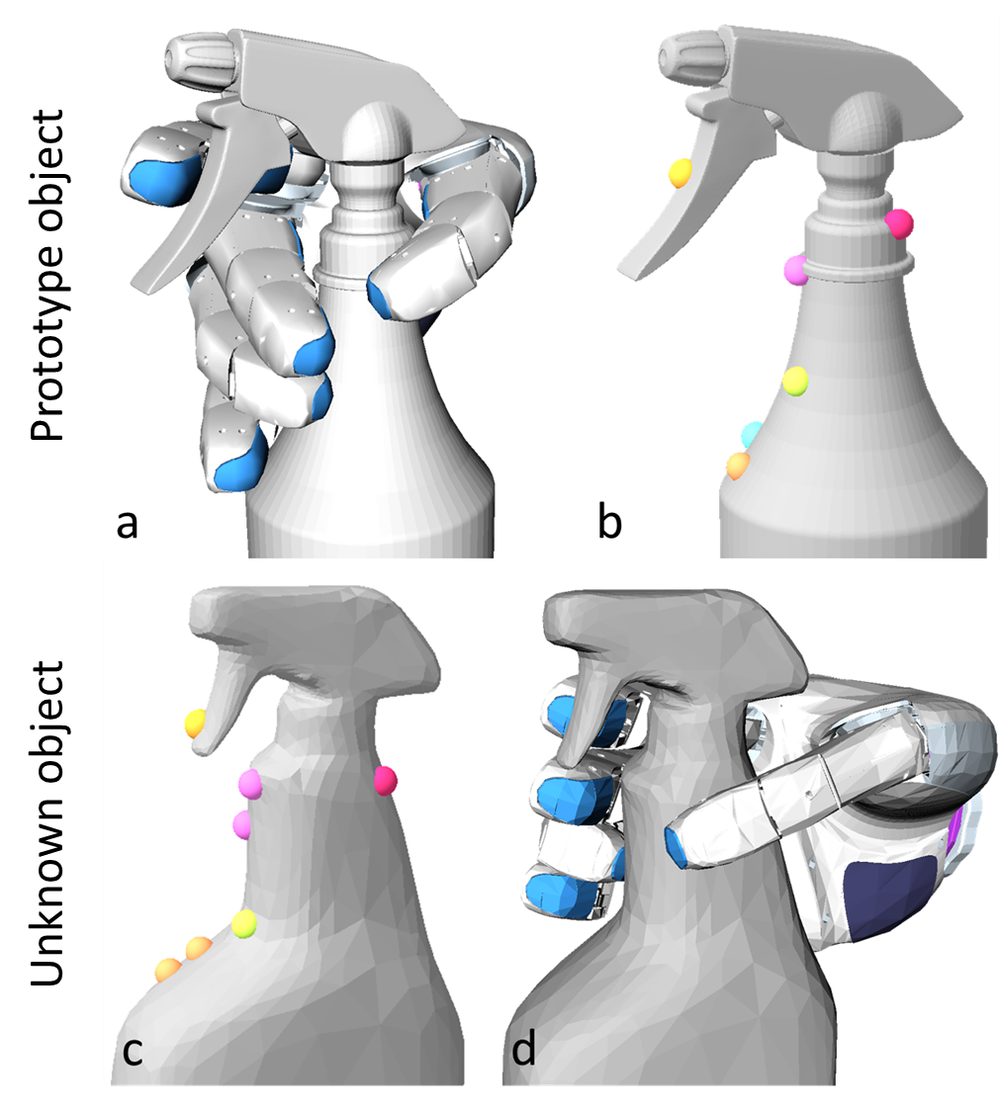
Für die funktional korrekte Handhabung, im Bild etwa einer unbekannten Sprühflasche, werden Kontaktpunkte (b) eines funktionalen Beispielgriffs (a) an einem bekannten Objekt derselben Art durch Verformung übertragen auf den neuen Fall (c). Aus den neuen Kontaktpunkten kann dann ein analoger funktionaler Griff geplant werden (d).
Credit:
Für die funktional korrekte Handhabung, im Bild etwa einer unbekannten Sprühflasche, werden Kontaktpunkte (b) eines funktionalen Beispielgriffs (a) an einem bekannten Objekt derselben Art durch Verformung übertragen auf den neuen Fall (c). Aus den neuen Kontaktpunkten kann dann ein analoger funktionaler Griff geplant werden (d).
Credit: