
Shape Analysis
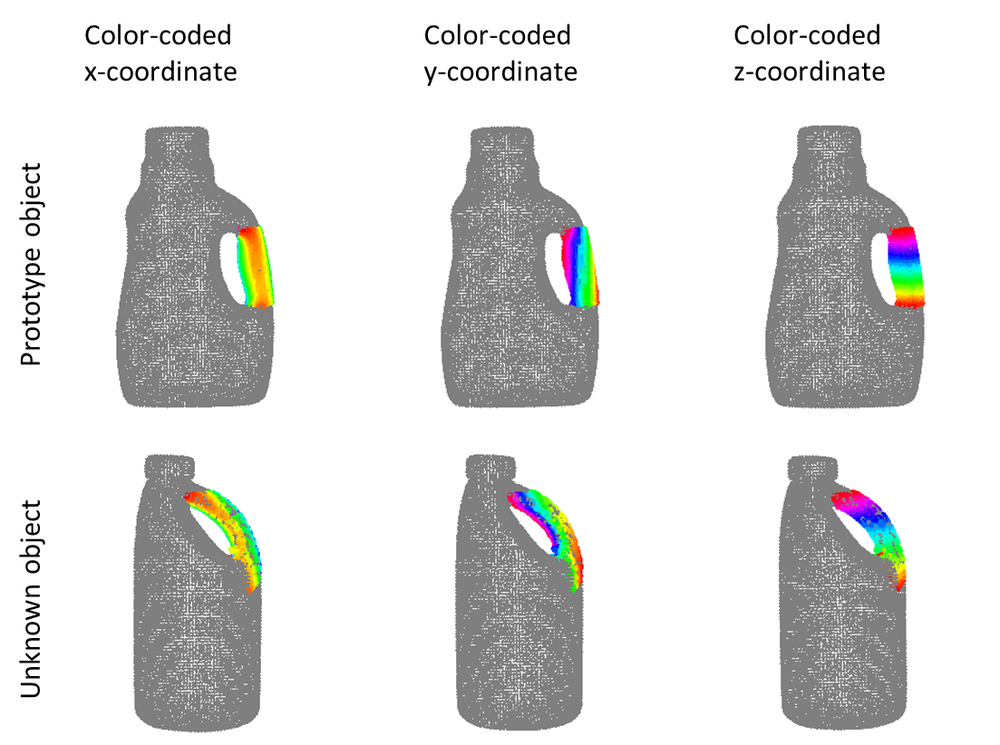

Object parts with particular functional significance can be detected through a suitable warping of prototypes onto new objects. Even detailed relations to a known exemplar can be uncovered. In the image, estimated point correspondences between the handles of two differing detergent bottles are marked with equal color; the color gradient codes the Cartesian coordinates in the prototype system.
Credit:
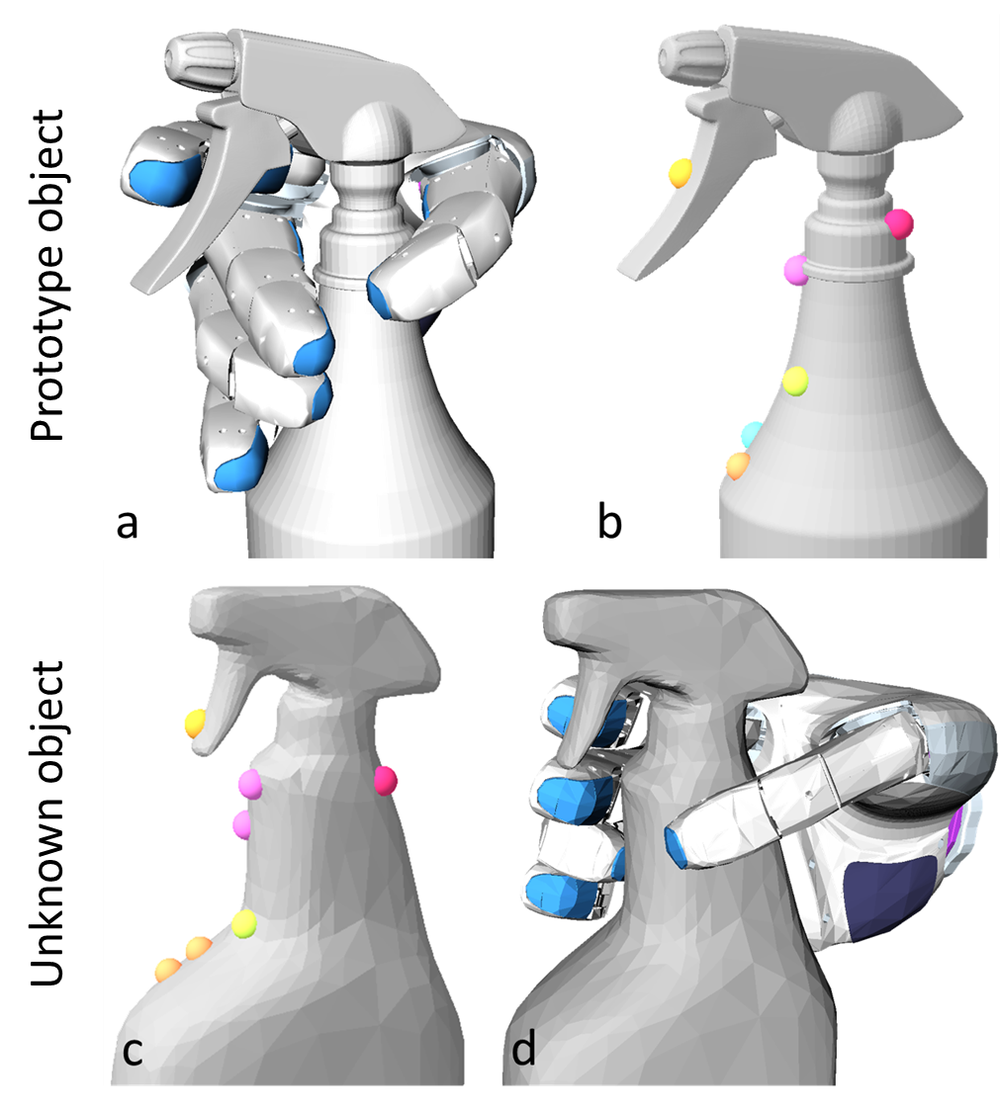
Functionally correct handling, e.g. of an unknown spray bottle shown in the image, is enabled through transfer of contact points (b) of a functional example grasp (a) made on a known object of the same kind onto the new case (c). Based on the new contacts, an analogous functional grasp can then be planned (d).
Credit:
Functionally correct handling, e.g. of an unknown spray bottle shown in the image, is enabled through transfer of contact points (b) of a functional example grasp (a) made on a known object of the same kind onto the new case (c). Based on the new contacts, an analogous functional grasp can then be planned (d).
Credit: