
Working student: Visual Perception for object manipulation

{kind=link}
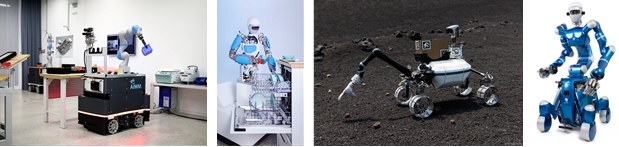
In the Institute of Robotics and Mechatronics at the DLR, we are developing future robotic systems in a large range of different environments: Our robots assemble products in the industries of the future, maintain satellites in space, extend peoples capabilities in household scenarios, or explore foreign planets.
A common capability most of those robots require is the manipulation of objects. In this context, the understanding of the underlying scene and the present objects is a crucial information. To this end, we in the Perception and Cognition Department work on methods to (visually) perceive the environment.
We are looking for motivated, hands-on students to help our research group in the development and integration of perception methods for our robotic systems. The main topics are the detection and segmentation of object instances, the estimation of their 6D pose, and tracking them over time. An additional challenge is the combined treatment of known and unknown objects and the challenge how to learn from the observations.
Tasks:
- Support the design and integration of new perception algorithms on our robotic systems
- Conduct evaluations of algorithms on the robots
- Support the development of project relevant robotic skills
Qualifications:
- Knowledge about computer vision and/or machine learning
- Practical experience in the context of computer vision and machine learning libraries, e.g., OpenCV, PCL, Pytorch, Tensorflow
- Hands-on attitude
- Basic knowledge about software frameworks in robotics (e.g., ROS)
- Programming skills in Python 3
- Familiar with software development (e.g., GIT)
What we offer:
- motivated and growth-promoting environment
- working with state-of-the-art algorithms
- supervision by highly competent experts in the field
- practical experience with real robotic systems
- option for bachelor’s/master’s thesis
Start Date:
• Earliest possible date