
Werkstudent/Masterstudent: Kalman Filtering for Sensor Fusion in an Orbital Robotic Servicing Mission Scenario
Description:
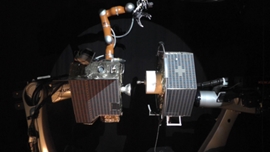
Orbital robotics research is advancing rapidly towards software integration and on-ground testing, in view of future in-orbit missions to approach, capture and service a target satellite. A primary mode of operation is based on the autonomy of the robot, which involves the sequential execution of perception, state estimation, planning and control tasks. Dedicated on-ground facilities, like the OOS-SIM, allow testing the functionality of these components on ground.


{kind=link}
The proposed work aims to solve the sensor fusion of the pose estimates of a tumbling target satellite from LIDAR-based and camera-based pose estimation algorithms. We want to develop and implement an Extended Kalman Filter for combined state estimation of the chaser and the target states, see our prior work in [1]. This has become a mission standard, and is foreseen as a strategy for on-orbit robotics missions [2,3]. The complexity of the task lies in the out-of-sequence measurement update for sensors (camera, LIDAR) that vary in their rates of measurement. The filter's performance will be evaluated with real measurement data from our OOS-SIM facility, as well as pose-estimation machine-learning algorithms available at our lab.
Requirements:
- Enrolled in a Master’s degree in robotics, computer science or a related field
- Knowledge of C++ and MATLAB/Simulink
- Bonus: Experience with robot control and dynamics and familiarity with Kalman Filter theory and implementation
Open position:
Working student (10 hrs/week) starting as soon as possible for a 2/3-month period, followed by a 6-month period as a Master student.
Related Literature:
[1] Robust Estimation of Motion States for Free-Floating Tumbling Target Capture, Poó Gallardo, Abril and Mishra, Hrishik and Massimo Giordano, Alessandro and Lampariello, Roberto, 2019 IEEE Aerospace Conference.
[2] Satellite and robotic arm combined control for spacecraft close-proximity operations, Basana, Federico et al., CEAS Space Journal, 2024.
[3] EROSS: In-Orbit Demonstration of European Robotic Orbital Support Services, Roa, Máximo A. et al., 2024 IEEE Aerospace Conference
[4] OOS-SIM facility website: https://www.dlr.de/en/rm/research/robotic-systems/multi-arm/oos-sim