
Working student / Master’s thesis: Unknown object instance segmentation


{kind=link}
{kind=link}
In the Institute of Robotics and Mechatronics at the DLR we are developing future robotic systems in a large range of various environments: Our robots assemble products in the industries of the future, maintain satellites in space, extend peoples’ capabilities in household environments, or explore foreign planets.
A common capability most of these robots require is the manipulation of objects. In this context, an important prerequisite is the detection and segmentation of these items. While many objects are readily known, a lot can happen in ever-changing surroundings, and newly, unknown objects can always be encountered: example scenarios include bin picking, cleaning up a desk with ubiquitous items, or a worker who forgot his coffee mug on the table. Since a standard detector cannot be trained to handle arbitrary object classes, other approaches need to handle such tasks.
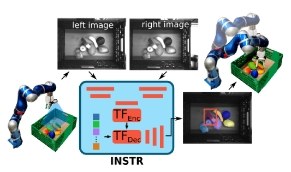
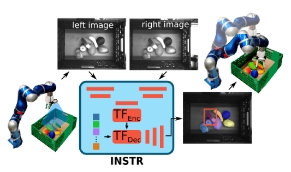
We are looking for motivated, hands-on students to help our research group regarding the improvement of our developed INSTR algorithm (Durner et al., “Unknown object segmentation from Stereo images”, IROS 2021). INSTR is a transformer-based network that is trained to predict a set of binary masks for all unknown object instances in an image. Potential improvements, but are not limited to, architectural / training data improvements, modality (e.g. semantic) incorporation, geometric-aware loss functions, correlation layer re-designs etc. This may be carried out as a working student position (up to 19hrs/month), or bachelor’s / master’s thesis.
Tasks:
- Identification of potential improvements of INSTR
- Implementation and training of the method
- Evaluation and validation on the STIOS benchmark dataset
- Integration and evaluation on a real-world robotic system
Qualifications:
- Knowledge about computer vision and / or machine learning
- Practical experience in the context of computer vision / machine learning in common libraries, e.g. OpenCV, Pytorch, Tensorflow
- Hands-on, dedicated, motivated attitude
- Basic knowledge about various programming languages / robotic software frameworks such as Python, ROS, git
What we offer:
- Motivated and growth-promoting environment
- Working with state-of-the-art algorithms
- Supervision by highly competent experts in the field
- Practical experience with real robotic systems
- Option for bachelor’s / master’s thesis
Start date: Earliest possible date
Kontakt
Office (PEK)