
Regelung
{kind=link}
Regelung einer mobilen Plattform
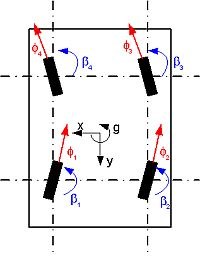
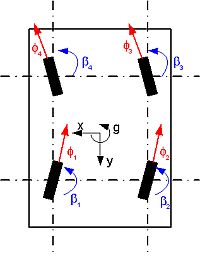
Die mobile Plattform verfügt über vier antreibbare und lenkbare Räder. Im Gegensatz zur mehr rollenartigen Ausführung bei einigen Robotern bilden die Lenk- und die Antriebsachsen Schnittpunkte. Daher ist die mobile Plattform zwar omnidirektional, aber nicht holonom.
Aus steuerungstechnischer Sicht gesehen lassen sich drei Aufgaben für mobile Roboter ableiten:
- Punkt-zu-Punkt-Bewegung (d. h. Regulierung),
- Bahnfolgen,
- Trajektorieverfolgung.
Im Gegensatz zu holonomen Systemen ist die Regulierung, d. h. Stabilisierung um einen vorgegebenen Sollwert, normalerweise schwieriger zu realisieren als die Nachverfolgung bei nicht holonomen Systemen. Eine Begründung hierzu liefert der Satz von Brockett, der als Voraussetzung für die Stabilisierbarkeit eines zeitinvarianten Systems eine zeitinvariante glatte Rückführung nennt.
Für die Regelung einer mobilen Plattform im Rahmen des Robutler-Szenarios nutzen wir eher pragmatische Ansätze. Einfache PD- und PID-Regelungen werden für die Regelung der Fahrgeschwindigkeit und der Lenkwinkel für jedes einzelne Rad eingesetzt. Auf Basis dieser internen Regelschleifen gehen wir bei der Positionsregelung eher von einem kinematischen als dynamischen Modell der mobilen Plattform aus. Wir gehen davon aus, dass Reibungs- und Trägheitseffekte ausreichend durch die Antriebs- und Lenkregelschleifen der einzelnen Räder kompensiert werden.
Basierend auf dem kinematischen Modell wurde eine Steuerung für Geschwindigkeit und eine für lineare Trajektorieverfolgung implementiert. Für Regelaufgaben nehmen wir im Grunde denselben Regler wie für die Trajektorieverfolgung. Aufgrund der oben aufgeführten Begrenzungen nach dem Satz von Brockett muss der Verfolgungsregler allerdings deaktiviert werden, wenn sich der Roboter der Zielposition ausreichend genähert hat.
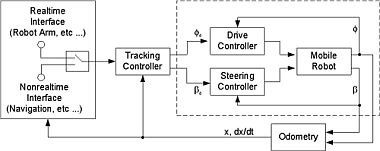

Wenn der mobile Roboter in Kombination mit einem impedanzgeregelten Arm eingesetzt wird (weiterführende Informationen siehe unten), ziehen wir normalerweise die Verwendung des Geschwindigkeitsreglers der mobilen Plattform vor. Das Regelziel der mobilen Plattform wird dann so definiert, dass sich Armposition und Arbeitsraumgrenzen nicht zu sehr annähern. Daher wird eine einfache Proportionalregelung mit der Armkonfiguration als Eingangsgröße und der Sollgeschwindigkeit der mobilen Plattform als Ausgangsgröße eingesetzt.
Regelung des menschenähnlichen Arms
Die verschiedenen Regelaufgaben für den Arm können klassifiziert werden als
- Positionsregelung (Regulierung, Verfolgung)
- Kraftregelung
- Nachgiebige Bewegungsregelung (Impedanz-, Admittanzregelung).
Die 7-DoF-Roboterarme des DLR sind insbesondere auf geringes Gewicht ausgelegt. Daher müssen alle Regelungen die Elastizität in den Gelenken berücksichtigen, die hauptsächlich von den Getrieben des Roboters herrührt. Für das Regelungskonzept wird von einem Roboter mit flexiblen Gelenken ausgegangen. Des Weiteren erwachsen aus der Redundanz des Arms zusätzliche Regelungsprobleme. Die für die DLR-Leichtbauroboter entwickelten Controller bzw. Regelungen sind hier ausführlich beschrieben.
Für Manipulationsaufgaben ist die Impedanzregelung des Arms von besonderem Interesse. Hier gilt es zu beachten, dass insbesondere die Verwendung von Gelenkmomentsensoren das Design hochempfindlicher Moment- und Impedanzregler ermöglicht. Die in [1,2] vorgesehenen Regler bestehen aus einer inneren Moment- und äußeren Impedanzrückführung, basierend auf der Messung der motorseitigen Position. In [1,2] wurde die physikalische Interpretation der inneren Momentrückführungsschleife vorgegeben und für die passivitätsbasierte Stabilitätsanalyse einer kartesischen Impedanzregelung verwendet.
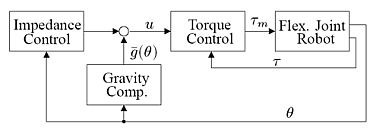
Die innere Momentrückführung dient zwei Zwecken. Zum einen verursacht die Momentrückführung eine Verringerung der effektiven Motorträgkeit für die an der Gliedseite wirkenden Kräfte. Dadurch verbessert sich die schwingungsdämpfende Wirkung einer zusätzlichen äußeren Regelschleife. Zum anderen schwächt sie die motorseitigen Reibungseffekte ab, da die Gelenkmomentsensoren sich auf der Gliedseite befinden.
Zusätzlich zur Momentregelung kommt eine äußere Impedanzregelschleife zum Einsatz, basierend auf der Messung der Motorposition.
Der erste Teil dieser Regelungsgleichung entspricht der Online-Schwerkraftkompensation aus [1]. Diese spezielle Schwerkraftkompensationsgleichung ermöglicht die Kompensation für die statischen Effekte der gliedseitigen Schwerkraftmomente, basiert aber ausschließlich auf der Messung der motorseitigen Position. Zusätzlich hierzu werden Steifigkeits- und Dämpfungsterme über eine Potenzialfunktion und eine positive bestimmte Dämpfungsmatrix implementiert.
Regelung der menschenähnlichen Hand
Siehe Abschnitt ‚Hände‘
Veröffentlichungen
[1]"A Passivity Based Cartesian Impedance Controller - Part I: Torque Feedback and Gravity Compensation", Ch. Ott, A. Albu-Schäffer, A. Kugi, S. Stramigioli, and G. Hirzinger, International Conference on Robotics and Automation 2004, pp. 2659-2665.
[2] "A Passivity Based Cartesian Impedance Controller - Part II: Full State Feedback, Impedance Design and Experiments", A. Albu-Schäffer, Ch. Ott, and G. Hirzinger, International Conference on Robotics and Automation 2004, pp. 2666-2672.