
Präsentationen / Szenarien

{kind=link}



World Space Congress (WSC) in Houston 2002
Im Labor waren Arm und Hand waren auf einem System mit linearer Achse montiert. Die Szenenanalysekomponente konnte Wasser- und Weinflaschen sowie zwei verschiedene Glasarten erkennen bzw. unterscheiden. Das Robotersystem war im Labor montiert und bekam seine Befehle über ein vom Institut für Roboterforschung aus Dortmund gebautes VR-System, das sich auf der WSC in Houston befand. Die Befehle sowie die Telemetriedaten wurden über das Internet gesendet. Des Weiteren wurde ein Videosignal hoher Qualität via ISDN nach Houston übertragen, um das Robotersystem im Labor zu zeigen.
Für private Vorführungen wurde ein einfaches Befehlsinterface mit RealVideo-Stream zur Visualisierung des Systemstatus bereitgestellt, das ausschließlich über die Internetverbindung lief.
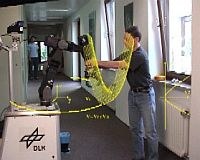
Automatica 2004
Das System war auf der mobilen Plattform integriert. Einfache Navigations- und Hindernisvermeidungsverfahren ermöglichten eine eigenständige Navigation zum Tisch. Eine Sprachschnittstelle wurde hinzugefügt und mit einem handelsüblichen Sprachbefehlssystem verbunden. So konnte der Roboter äußerst intuitiv vom gesamten Standbereich aus sprachgesteuert werden. Die Szenenanalysekomponente funktionierte ohne zusätzliche Sonderbeleuchtung. Die Präzision der Objektlokalisierung erlaubte das Abschrauben des Deckels von der Wasserflasche (siehe Abbildung).
Das Abwischen mit einem Schwamm wurde ebenfalls vorgeführt. Durch das geführte Vormachen (Teach-in) der Grundbewegung Wischen konnte das System eine Wisch-Trajektorie für einen Bereich mit ausgeschüttetem Wein erzeugen. Der zu wischende Bereich wurde über Sicht erfasst bzw. erkannt.
Video-Konferenzbeitrag für ICRA 2005 (Finalist für den Video Award)
Eine neue komplexe Fertigkeit wurde hinzugefügt, mit der das System eine Tür öffnen und hindurchfahren kann. Zuerst fährt das System mithilfe der Lokalisierung mittels Odometer und Laserscanner vor die Tür. Dann erkennt das Sichtsystem per Mustervergleich den Türgriff. Die Übereinstimmungen der drei Videobilder des Digiclops-Systems ermöglichen eine ausreichend genaue Lokalisierung des Türgriffs für das sichere Annähern und Greifen des Griffs. Nach Kontaktherstellung mit der Hand wechselt der Arm in eine kartesische Impedanzregelung auf Basis einer speziellen Potenzialfunktion. Beim Durchfahren der Türöffnung liegt die virtuelle Gleichgewichtslage des Arms auf einer Kreisbahn relativ zur Basisplattform. Da keine Steifigkeit in der Rotationsachse eingestellt ist, passt sich die Orientierung der Hand automatisch an. Mit diesem Ansatz kann die Tür auch ohne Informationen über deren genaue Abmessungen geöffnet werden.