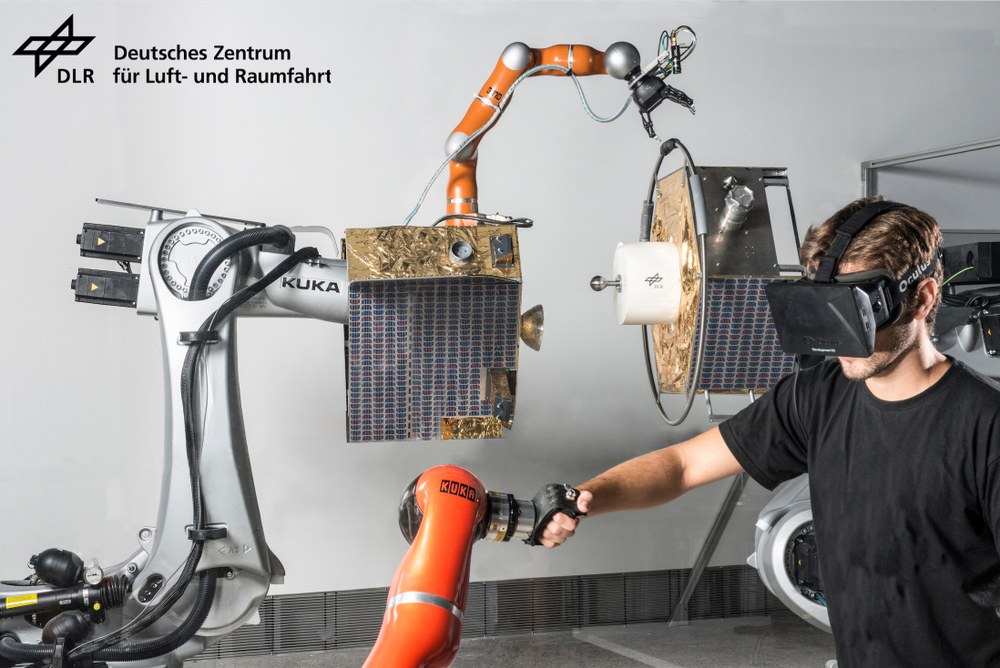
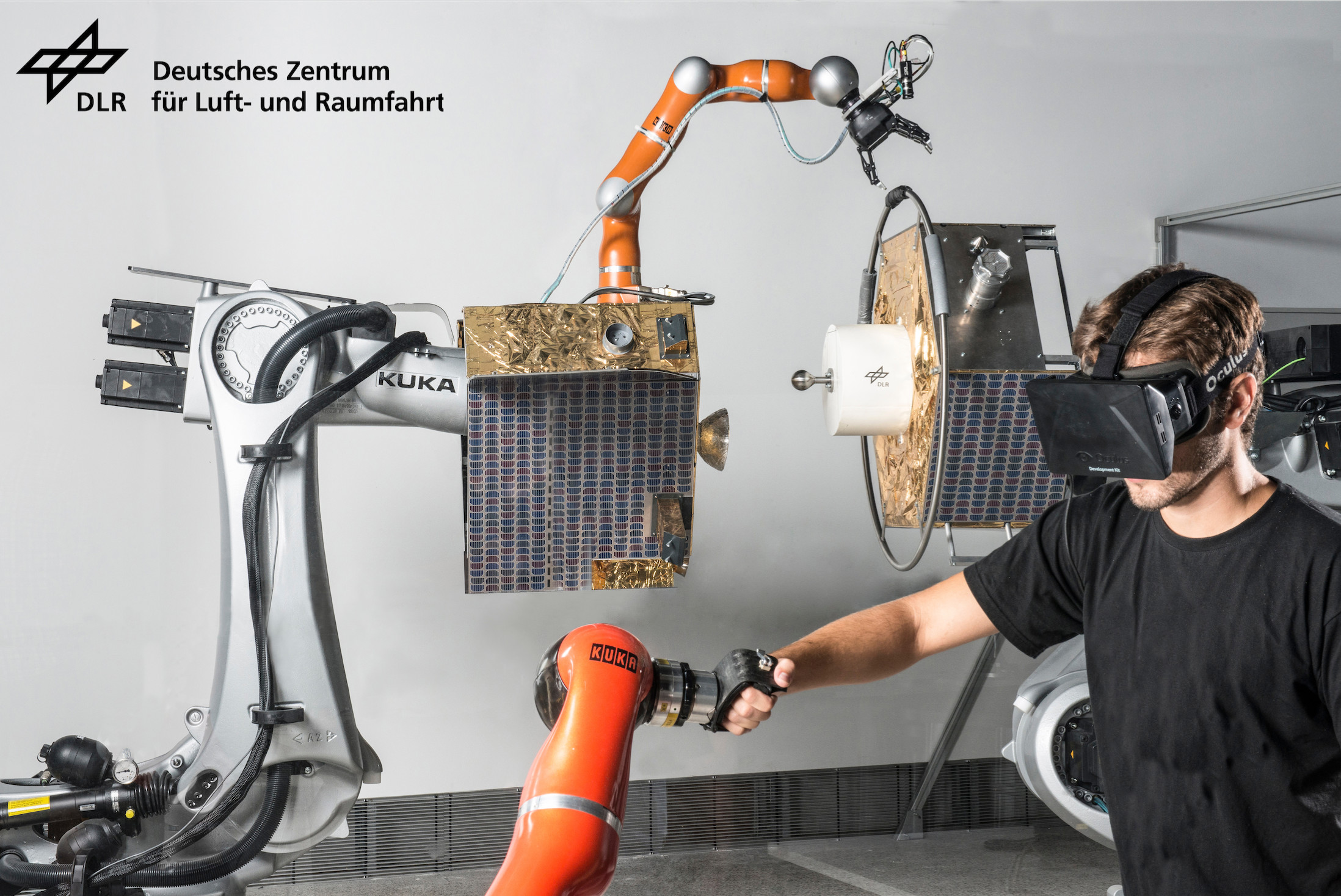
Der OOS-SIM (on-orbit servicing simulator) ist ein Simulator für On-Orbit-Servicing-Aufgaben wie Montage-, Wartungs- und Instandhaltungsarbeiten an Satelliten, die sich in einer Umlaufbahn um die Erde befinden. Außerdem wird die Einsetzbarkeit des Systems bei der Entfernung von nicht mehr funktionierenden taumelnden Zielsatelliten aus dem Orbit untersucht.
Zwei große Industrieroboter halten einerseits die Wartungseinheit (oder den Chaser-Satelliten) und andererseits den Zielsatelliten und simulieren deren Schwerelosigkeit. Auf der Wartungseinheit ist ein feinfühliger Leichtbauroboterarm mit Greifer montiert. Dieses gesamte Wartungssystem nennt man in der orbitalen Robotikfreifliegende Roboter.
Im Jahr 2013 wurde OOS-SIM erstmals der Öffentlichkeit präsentiert.
Technische Daten
Größe:
10m × 7,5m × 5m
Gewicht:
• 2 Industrieroboter (KR120), jeweils 1049kg • 1 Leichtbauroboter (LBR IV+, Nachfolger des LBR III), 15kg • 1 haptisches Eingabegerät (LBR IV), 15kg
• 3 Kraft-Momenten-Sensoren (1 × LBR IV+, 2 × KR120) • Stereo-Kamera am Greifer des Roboters • LIDAR am Chaser • IMU am Chaser
Arbeitsraum:
23,38m² im Querschnitt
Kommunikation:
Ethernet, EtherCAT, SERCOS, RSI
Besonderheiten:
• Simulator für on-orbit servicing • Orbitale Dynamik (Schwerelosigkeit, Mehrkörperdynamik mit Kontakten) kann simuliert werden • Orbitale Lichtverhältnisse können simuliert werden • Annährung, Greifen und Stabilisierung eines frei taumelnden, nicht-kooperativen Zielsatelliten mit einem freifliegenden Roboter kann im autonomem oder im telepräsenten Modus untersucht werden
Systembeschreibung
Die OOS-SIM-Anlage hat zweierlei Nutzen. Zum einen ist sie in der Lage, die Mehrkörperdynamik der freifliegenden Roboter im Orbit ohne Schwerkrafteinfluss nachzubilden. Hierzu wird die Bewegung des Chaser-Satelliten mit einem Industrieroboter mit sechs Freiheitsgraden realisiert. Die Anlage erlaubt es auch, Kontakte zwischen dem Leichtbauroboter und dem Zielsatelliten zu simulieren – mit Betrachtung der orbitalen Dynamik. Die Kraft-Momenten-Sensoren an den Schnittstellen der Satelliten zu den Industrierobotern messen die Kontaktkräfte und liefern sie an eine Echtzeitsimulation der Mehrkörperdynamik des freifliegenden Roboters und des Zielsatelliten („Hardware-in-the-loop“ Verfahren). In dieser Anwendung stellt diese Konfiguration eine weltweit einzigartige Lösung dar.
Die zweite Anwendung der Anlage besteht darin, eine Test- und Analyseplattform für die Entwicklung und Validierung von orbitalen Roboterregelungs- und Bildverarbeitungsmethoden zu bieten. Mit einer schwerkraftkompensierten Dynamik erfordert die Roboterregelung geeignete Lösungen, um die Interaktion zwischen Roboter- und Satellitenbasisbewegung beherrschbar zu machen. Der Chaser-Satellit kann entweder mit oder ohne dessen Aktuatoren (z.B. Schubdüsen des Lageregelungssystems) betrieben werden. Beide Strategien sind aktuelle Forschungsthemen am Institut für Robotik und Mechatronik. Der Leichtbauroboter kann auch von einem Operator durch Teleoperation (oder Telepräsenz mit Rückkopplung der Kontaktkräfte) kommandiert werden. Auf dem Greifer des Roboters ist eine Stereokamera montiert, die die robotischen Aufgaben (den Greifprozess) unterstützt. Einen Sonnensimulator und schwarze Vorhänge erlauben die Simulation verschiedener orbitaler Lichtverhältnisse, unter denen Bildverarbeitungsmethoden erprobt werden können.
Letztendlich ist das Ziel dieser Anlage, das Greifen eines nicht kooperativen taumelnden Zielsatelliten zu demonstrieren. Der nicht-kooperative Charakter hierbei gründet auf der Annahme, dass der Zielsatellit einerseits nicht steuerbar ist und andererseits auch keinerlei hilfreichen visuellen Merkmale auf seiner Oberfläche aufweist.
Ein mögliches Einsatz-Szenario ist das Active Debris Removal, bei der Zielsatelliten aus dem Orbit entfernt werden, indem man sie kontrolliert abstürzen lässt, sodass sie in der Erdatmosphäre verglühen und ins Meer fallen.
OOS-SIM-Anlage
Zukünftige Weltraum-Missionen müssen eine Vielzahl an komplexen Herausforderungen bewältigen, wie das Montieren von Strukturen für Raumstationen oder die Verlängerung der Lebensdauer von Satelliten in der Umlaufbahn. Die OOS-SIM-Anlage ermöglicht das dynamische Verhalten eines dedizierten Roboters im Orbit nachzubilden. Dazu können passende operationelle Modi der Robotersteuerung und Regelung getestet und validiert werden.
Um eine orbitale Beleuchtung für OOS-SIM zu simulieren, wird das System von schwarzen Vorhängen einhüllt und von einer starken Lichtquelle angestrahlt, die auf einer Schiene an der Labordecke montiert ist.
Im Telepräsenz-Modus bedient ein (menschlicher) Operator den Leichtbauroboter von OOS-SIM aus der Ferne mit einem zweiten Leichtbauroboter als Eingabegerät.
Artigas, Jordi, et al. "The OOS-SIM: An on-ground simulation facility for on-orbit servicing robotic operations." in Proc. of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, USA, pp. 2854-2860, May 2015.
Lampariello, R., Mishra, H., Oumer, N., Schmidt, P., De Stefano, M., & Albu-Schäffer, A. (2018). "Tracking control for the grasping of a tumbling satellite with a free-floating robot". IEEE Robotics and Automation Letters, 3(4), 3638-3645.
Giordano, A. M., Ott, C., & Albu-Schäffer, A. (2019). "Coordinated control of spacecraft's attitude and end-effector for space robots". IEEE Robotics and Automation Letters, 4(2), 2108-2115.
De Stefano, M., Mishra, H., Balachandran, R., Lampariello, R., Ott, C., & Secchi, C. (2019). "Multi-rate tracking control for a space robot on a controlled satellite: A passivity-based strategy". IEEE Robotics and Automation Letters, 4(2), 1319-1326.
De Stefano, M., Balachandran, R., & Secchi, C. (2019). "A Passivity-Based Approach for Simulating Satellite Dynamics With Robots: Discrete-Time Integration and Time-Delay Compensation". IEEE Transactions on Robotics, 36(1), 189-203.
Giordano, A. M., Dietrich, A., Ott, C., & Albu-Schäffer, A. (2020). Coordination of thrusters, reaction wheels, and arm in orbital robots. Robotics and Autonomous Systems.
H. Mishra, A. M. Giordano, M. De Stefano, R. Lampariello, and C. Ott, “Inertially-Decoupled Equations for Hardware-in-the-Loop Simulation of an Orbital Robot with External Forces". IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020. (accepted).





{kind=link}
{kind=link}
{kind=link}
{kind=link}