
EE-Airbag


Airbag für robotische Endeffektoren für sichere Mensch-Roboter-Kollaboration
Industrie 4.0 fordert und bedingt den Einsatz von schutzzaunlosen Robotersystemen zur sicheren Mensch-Roboter-Kollaboration (MRK) in der Produktion und bildet einen aktuellen Schwerpunkt in der Robotik. Während immer mehr neue Robotertypen für MRK direkt eingesetzt werden können, stellen Roboterwerkzeuge, aber auch Werkstücke, immer noch ein großes Gefährdungspotenzial für mögliche Verletzungen im Falle einer Kollision zwischen Maschine und Mensch dar. Um dieses Problem zu adressieren haben wir ein Sicherheitsmodul entwickelt, das MRK für eine breite Palette an Roboterwerkzeugen und Werkstücken ermöglicht, ohne die Funktion des Roboter-Gesamtsystems einzuschränken. Dazu umschließt das Sicherheitsmodul bei Verfahren des Roboters kontinuierlich Werkzeug und Werkstück mit einem Airbag und gibt beide anschließend durch Ablassen der Druckluft wieder frei. Dadurch können Taktzeiten in der Produktion reduziert und die Produktivität wesentlich erhöht werden.
Technische Daten
Größe: | 300 mm x Ø180 mm |
Gewicht: | ca. 0,5 kg |
Belüftungsdauer: | < 0,5 s |
Entlüftungsdauer: | < 0,8 s |
mögl. Mindestradien Werkzeug/Werkstück: | 0,2 mm |
mögl. Robotergeschwindigkeit LBR4+ für MRK (ISO/TS 15066) mit 2-Finger-Robotiq-Greifer: | 1 m/s |
Energieversorgung: | t.b.d. |
Besonderheiten: | • Dämpfung von Kollissionen • intrinsische Sicherheit • Kollisionserkennung • Interaktion • schnelle Be- und Entlüftungszeiten • Druckluftversorgung |

KUKA Innovation Award 2017
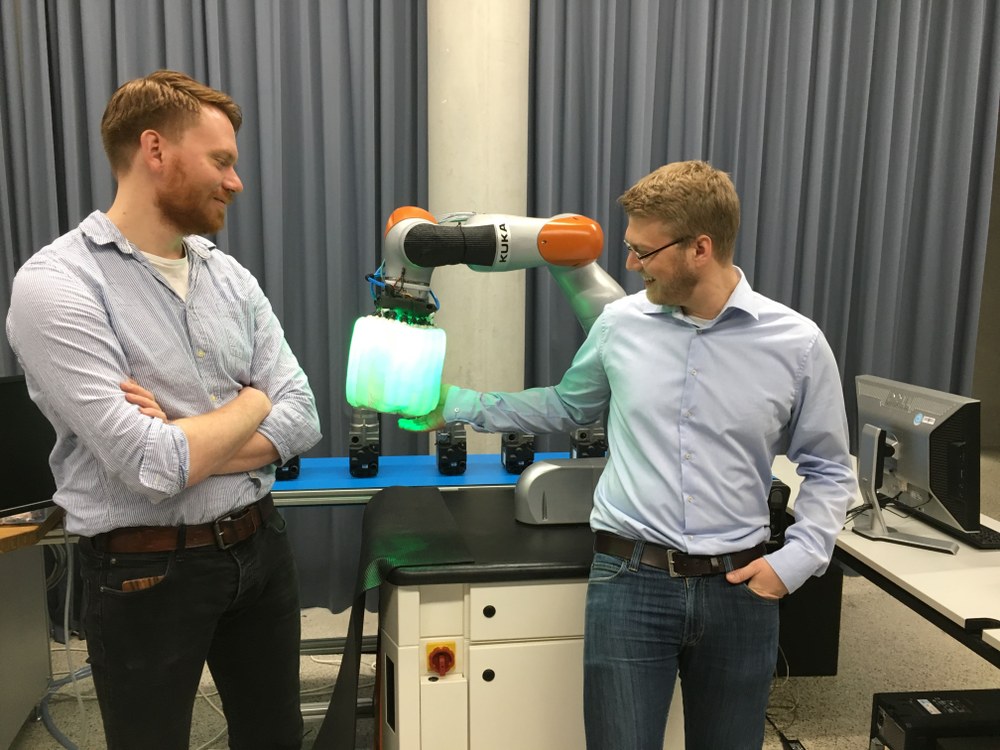
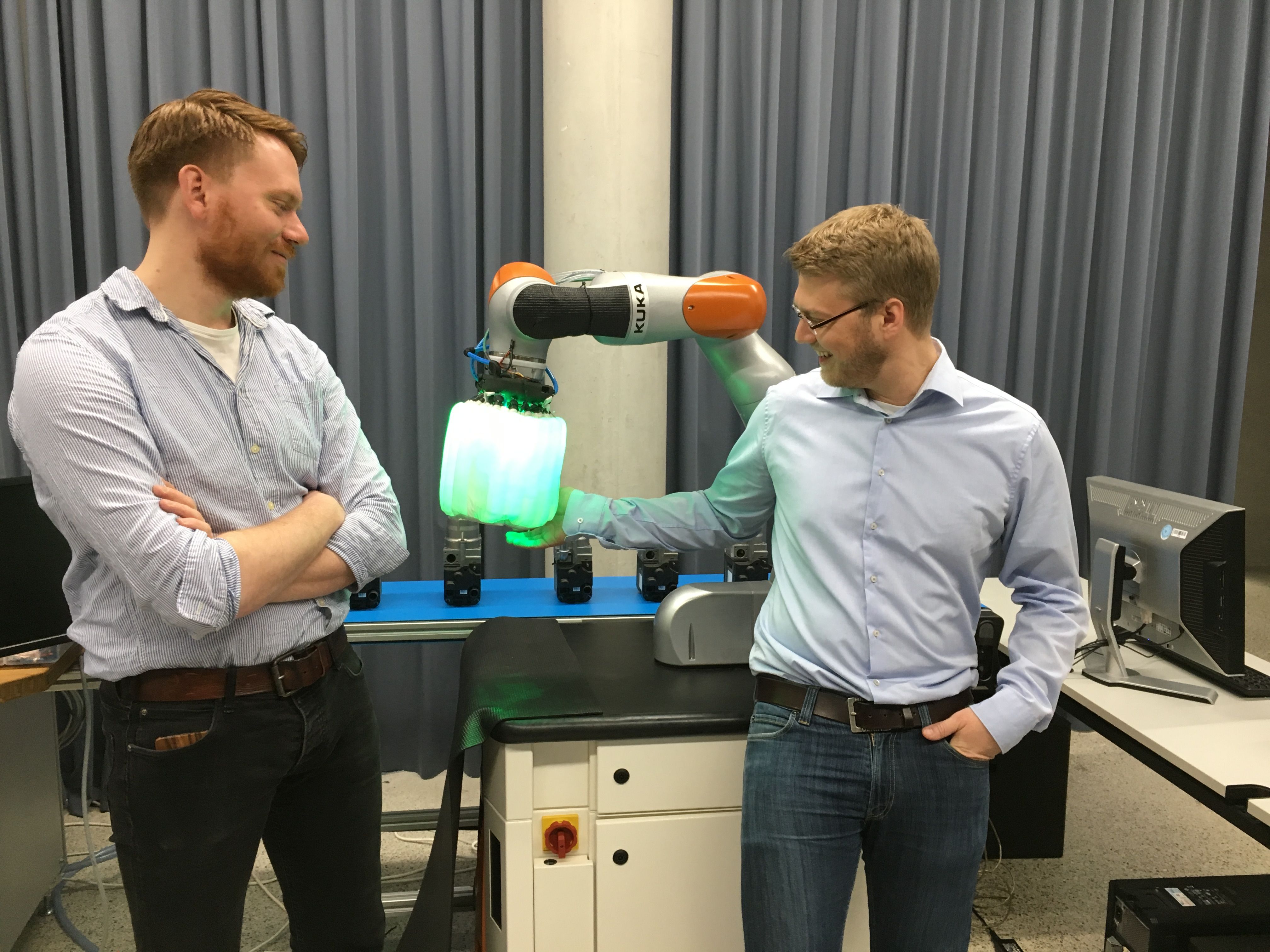
Der Airbag gewann auf der Hannover Messe 2017 den mit 20.000€ dotierten KUKA Innovation Award.
{kind=link}
{kind=link}
Hannes Höppner und Roman Weitschat zusammen mit dem Airbag für robotische Endeffektoren
{kind=link}
Airbag für robotische Endeffektoren für sichere Mensch-Roboter-Kollaboration
Industrie 4.0 fordert und bedingt den Einsatz von schutzzaunlosen Robotersystemen zur sicheren Mensch-Roboter-Kollaboration (MRK) in der Produktion und bildet einen aktuellen Schwerpunkt in der Robotik. Während immer mehr neue Robotertypen für MRK direkt eingesetzt werden können, stellen Roboterwerkzeuge, aber auch Werkstücke, immer noch ein großes Gefährdungspotenzial für mögliche Verletzungen im Falle einer Kollision zwischen Maschine und Mensch dar. Um dieses Problem zu adressieren haben wir ein Sicherheitsmodul entwickelt, das MRK für eine breite Palette an Roboterwerkzeugen und Werkstücken ermöglicht, ohne die Funktion des Roboter-Gesamtsystems einzuschränken. Dazu umschließt das Sicherheitsmodul bei Verfahren des Roboters kontinuierlich Werkzeug und Werkstück mit einem Airbag und gibt beide anschließend durch Ablassen der Druckluft wieder frei. Dadurch können Taktzeiten in der Produktion reduziert und die Produktivität wesentlich erhöht werden.