
Mechatronisches Design
Das Systemdesign verwendet Vorarbeiten des Instituts, den DLR Leichtbauroboter III und die DLR Hand II. Der Oberkörper auf Basis von LBR-Technologie, sowie die mobile Plattform erweitern den Arbeitsbereich der Arme und Hände. Der Gesamtaufbau ähnelt dabei dem des Menschen. Der Oberkörper beinhaltet insgesamt 43 aktuierte Freiheitsgrade, wobei die meisten mit abtriebsseitigen Drehmomentsensoren ausgestattet sind.
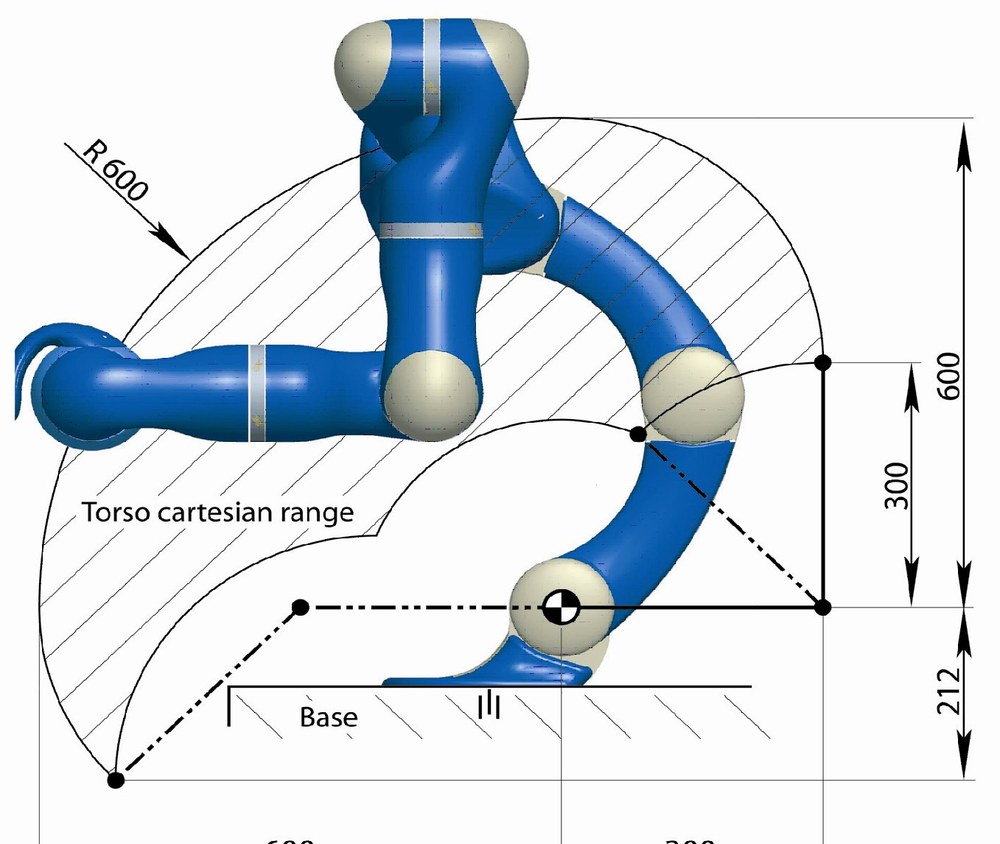
Allgemeines:
- Arbeitsraum: ~ 1,7 m Durchmesser
- Gesamtgewicht: ~ 200 kg
- Nutzlast: ~ 20 kg
Aktuierte Freiheitsgrade:
- Torso und Hals: 5
- Arme: 2 x 7
- Hände: 2 x 12
- Räder: 4 x 2 (+ 4 passive Freiheitsgrade)
Sensoren:
- 41 x Drehmoment (abtriebsseitig)
- 43 x Position (motor- / abtriebsseitig)
- 2 Prosilica Kameras für Stereovision
- 5 Asus Xtion Bewegungsdetektions-Sensoren


Ausgewählte Veröffentlichungen
Christoph Borst, Thomas Wimböck, Florian Schmidt, Mathias Fuchs, Bernhard Brunner, Franziska Zacharias, P. R. Giordano, Reiner Konietschke, Wolfgang Sepp, Stefan Fuchs, et al., “Rollin’justin-mobile platform with variable base,” in Proc. of the IEEE International Conference on Robotics and Automation, Kobe, Japan, May 2009, pp. 1597–1598.
Mathias Fuchs, Christoph Borst, Paolo R. Giordano, Andreas Baumann, Erich Kraemer, Jörg Langwald, Robin Gruber, Nikolaus Seitz, Georg Plank, Klaus Kunze, Robert Burger, Florian Schmidt, Thomas Wimböck, Gerd Hirzinger, "Rollin' Justin - Design considerations and realization of a mobile platform for a humanoid upper body", in Proc. of the IEEE International Conference on Robotics and Automation, Kobe, Japan, May 2009