
Regelung
Einführung
Die Einführung nachgiebiger Aktoren in Robotersystemen verbessert die mechanische Robustheit gegenüber harten Stößen sowie unbekannten Kontaktkräften und kann die Energieeffizienz erhöhen. Die zwischen Motor- und Gelenkträgheit wirkenden elastischen Elemente führen zu einem dynamischen Verhalten eines Tiefpassfilters bei externer Belastung. Im Gegensatz zu klassischen Robotern mit elastischen Gelenken (FJR), bei denen die linearen Elastizitäten vor allem durch die Gewichtsreduzierung bedingt sind, ist die Steifigkeit von nachgiebigen Robotern, die mit Aktoren mit variabler Impedanz (VIA) realisiert werden, zustandsabhängig und mindestens eine Größenordnung niedriger, so dass die Annahmen der singulären Störungstheorie nicht mehr gelten. Die mechanische Nachgiebigkeit bietet viele Vorteile, hat aber auch ihren Preis: Die Systemdynamik ist unteraktuiert, da die Anzahl der Dimensionen des Konfigurationsraums doppelt so hoch ist wie die Anzahl der Reglereingänge. Darüber hinaus werden nachgiebige Aktoren zur Verbesserung der Energiespeicherfähigkeit und der Effizienz im Allgemeinen oft so konstruiert, dass die Dämpfung und Reibung parallel zur Feder vernachlässigbar sind. Dadurch kann eine unerwünschte, systeminhärente Schwingungsdynamik entstehen. Darüber hinaus weisen viele Roboter mit variabler Steifigkeit eine stark nichtlineare Elastizität auf. Dies macht die Regelung solcher Roboter zu einer anspruchsvollen Aufgabe. Im Folgenden finden Sie eine Auswahl von Publikationen, die die Regelungskonzepte vorstellen, die im täglichen Betrieb von David zum Einsatz kommen.
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Elastic Structure Preserving (ESP) Control
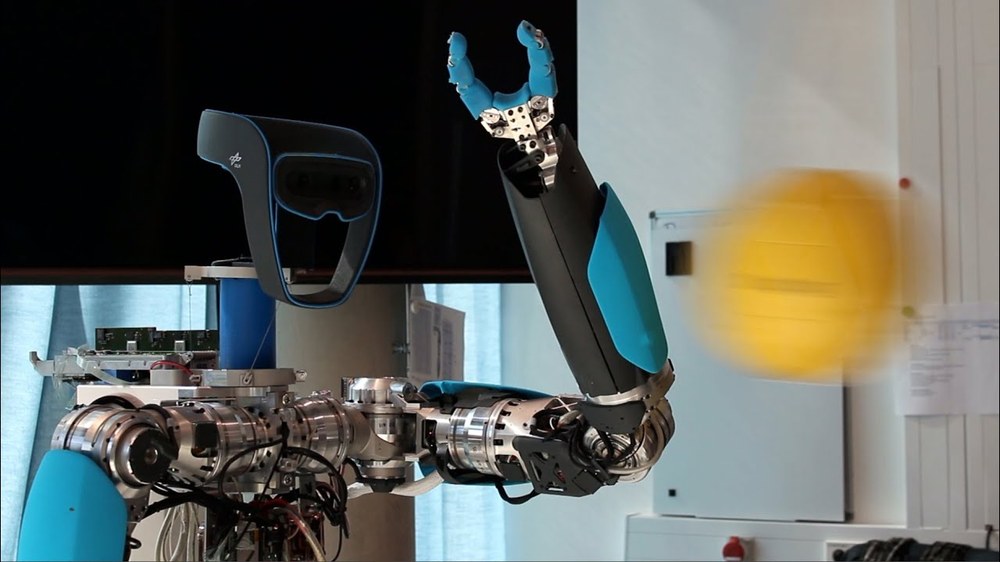
Eingsetzt werden eine Reihe von passivitätsbasierten Regelungskonzepten, die ein globales asymptotisches Bewegungstracking und die Zuweisung link-seitiger Dämpfung an nachgiebigen Robotersystemen mit hochgradig nichtlinearen Aktoren mit variabler Steifigkeit erreichen. Das Regelungskonzept basiert auf der Idee, die intrinsische Systemdynamik nur minimal zu verändern, indem lediglich link-seitige Dämpfungsterme und Feedforward-Terme hinzugefügt werden, um ein asymptotisches Folgeverhalten zu erreichen. Das inhärente elastische Verhalten bleibt dabei unverändert.
Das folgende Video zeigt die Wirksamkeit dieser neuartigen Regelungsansätze:
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
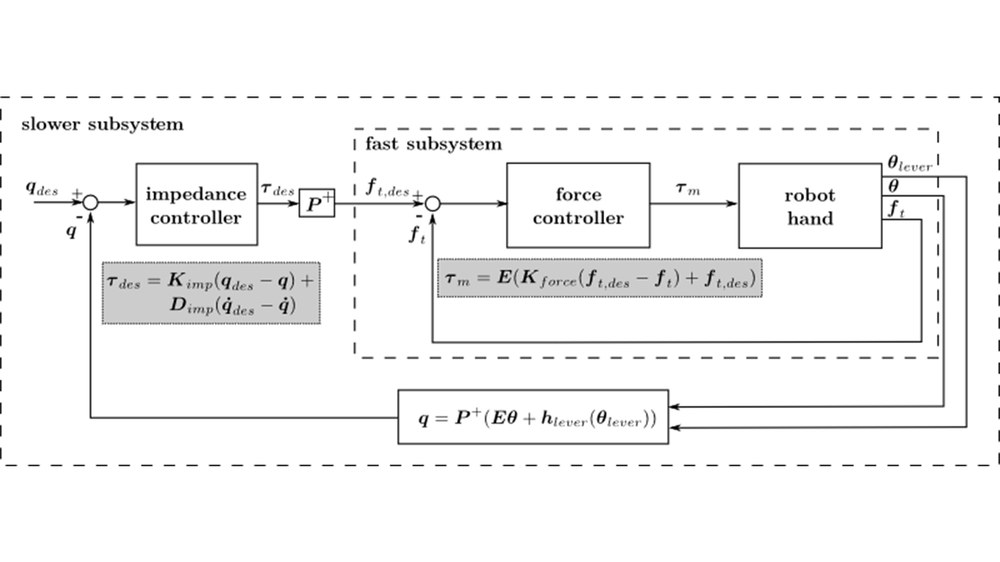
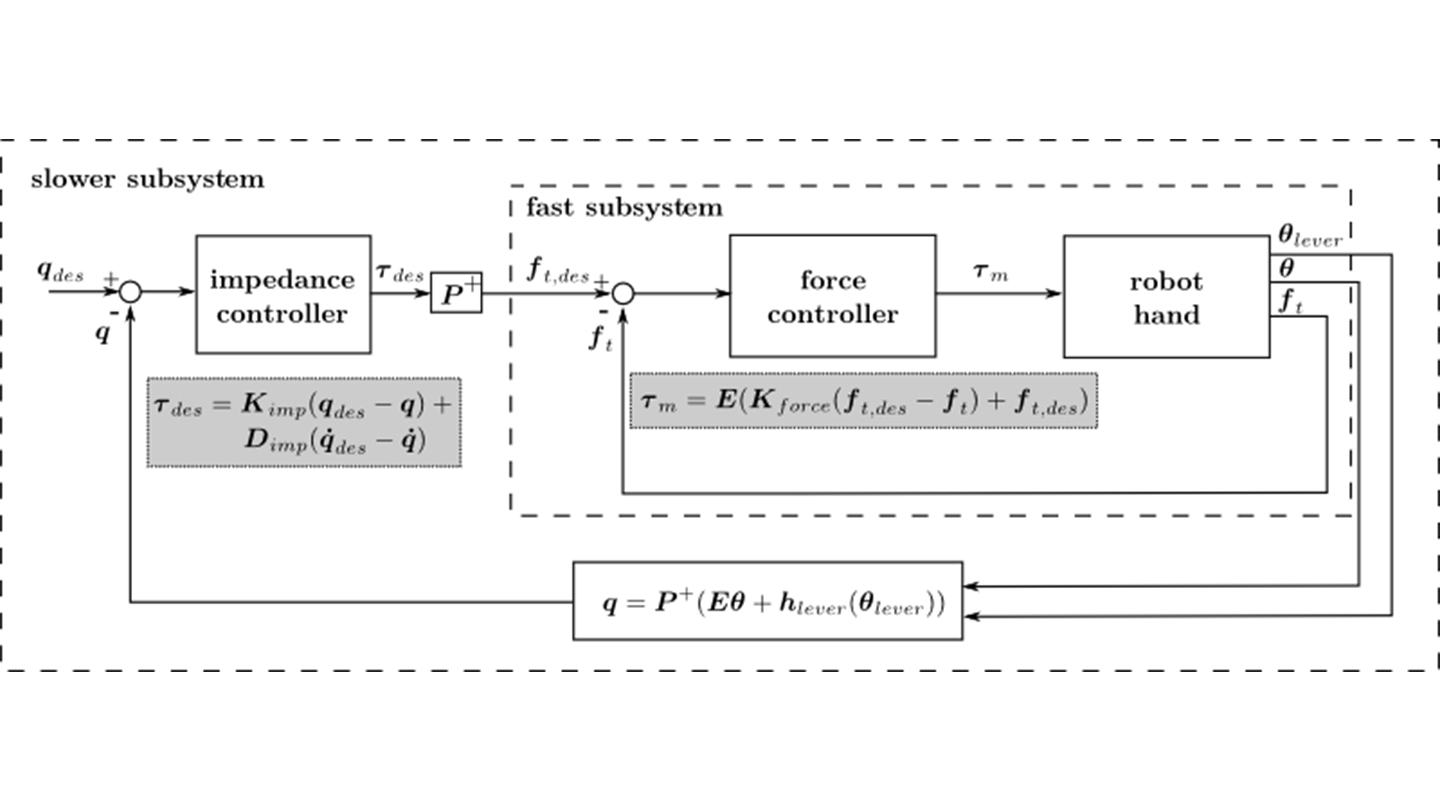
Elastic Structure Preserving Impedance (ESPi) Control
Das Regelungskonzept ESPi ermöglicht die Implementierung einer gewünschten link-seitigen Steifigkeit unter Erhaltung der intrinsischen elastischen Struktur des Systems. Das folgende Video zeigt diese Methodik für die Implementierung eines Impedanzverhaltens im Gelenksraum und Task space.
Das folgende Video zeigt die Wirksamkeit dieses neuartigen Regelungsansatzes:

Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Anwendung der ESP-Regelung auf BAVS-Aktuatoren (Biantagonistic Variable Stiffness)
Das ESP-Regelungskonzept wurde auf BAVS-Aktuatoren erweitert, die in der Unterarmrotation und im Handgelenk von David implementiert sind.
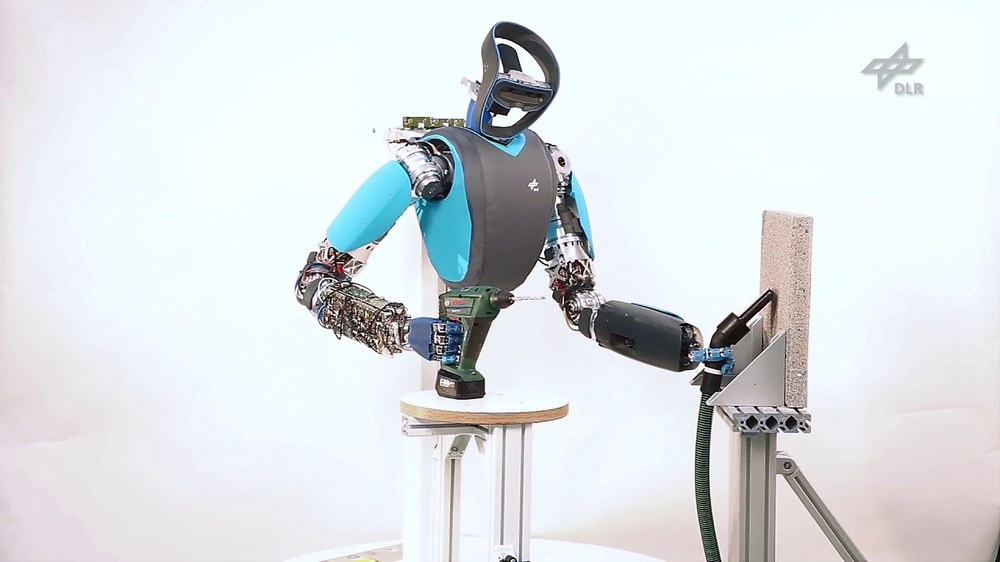
Handregelung
Die anthropomorphe Kinematik ermöglicht vielfältige Griffe
Nachgiebige Sehnen führen zu mechanischer Robustheit, erfordern aber komplexe Regelungsmethoden
Über interne Kräfte kann die Gelenksteifigkeit moduliert werden, dabei müssen aber Drehmoment- und Richtungszwangsbedingungen eingehalten werden
Backstepping-Regelung

{kind=link}
Laufende Arbeit
Das ESP-Regelungskonzept wird derzeit auf die Finger von David erweitert, die ein stark nichtlineares und elastisch gekoppeltes Verhalten aufweisen.
Ausgewählte Veröffentlichungen
Mengacci, Riccardo, et al. "Elastic Structure Preserving Control for Compliant Robots Driven by Agonistic-Antagonistic Actuators (ESPaa)." in IEEE Robotics and Automation Letters 6.2 (2021): 879-886.
Manuel Keppler, Dominic Lakatos, Christian Ott, Alin Albu-Schäffer, "Elastic Structure Preserving Impedance (ESπ) Control for Compliantly Actuated Robots", in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, Oct 2018.
Manuel Keppler, Dominic Lakatos, Christian Ott, Alin Albu-Schäffer, "Elastic Structure Preserving (ESP) Control for Compliantly Actuated Robots", in IEEE Transactions on Robotics, Volume: 34 , Issue: 2 , April 2018.