Die MICA ist ein vielseitig einsetzbares Instrument für die robotergestützte minimalinvasive Chirurgie. Als Mikro-Manipulator mit drei Freiheitsgraden wird sie an einen MIRO-Arm angekoppelt und erweitert die kinematische Kette dadurch um drei Gelenke. Im Jahr 2010 wurde MICA erstmals des Öffentlichkeit präsentiert.
Technische Daten
Größe:
Antriebseinheit: 220 mm × 60 mm
Werkzeug: 300 mm × 10 mm (Schaftlänge variabel)
Gewicht:
850 g
Freiheitsgrade:
3
Maximalkraft:
10 N
Bewegungsbereich:
+/- 90°
Bewegungsfrequenz:
bis zu 5 Hz (z.B. für Bewegungskompensation des Herzens)
Kartesiche Positionsregelung mit 3 kHz, Motorregelung mit 96 kHz
Systembeschreibung
Die DLR MICA ist die zweite Generation der vielseitig einsetzbaren Instrumente für die minimalinvasive Chirurgie, welche am Institut für Robotik und Mechatronik entwickelt wurden. Für minimalinvasive Eingriffe im Rahmen des MiroSurge-Szenarios werden diese robotischen Instrumente an den MIRO-Arm angekoppelt. Somit erweitert die MICA den Telemanipulator um die Gelenke 8, 9 und 10. Eine MICA besteht aus einer Antriebseinheit und dem aufgabenspezifischen Werkzeug mit Werkzeuginterface, Schaft und Endeffektor.
Die MICA Antriebseinheit kann mit verschiedenen Instrumenten für unterschiedliche chirurgische Applikationen kombiniert werden. Die einzelnen Instrumente unterscheiden sich hinsichtlich der Anzahl der Freiheitsgrade, der Funktionalität des Endeffektors und ihrer Bewegungsbereiche. Der Antrieb eines Instruments erfolgt durch drei Linearbewegungen, welche über das Instrumenteninterface von der Antriebseinheit zum Instrument übertragen werden. Das Instrumenteninterface ermöglicht sowohl eine für das Instrument angemessene Skalierung der Antriebskräfte als auch eine standardisierte Digitalkommunikation mit den im Instrument integrierten Sensoren, wie z.B. dem DLR Kraft-/Momentensensor. In der gegenwärtigen Konfiguration umfasst das Instrument ein Handgelenk mit zwei Freiheitsgraden, einen Endeffektor (z.B. Zange, Schere, Nadelhalter) und einen 7 DoF Kraft-/Momentensensor, wodurch eine feinfühlige Manipulation und haptisches Feedback aus dem Operationsgebiet möglich sind.
Der beim MIRO verfolgte Ansatz eines vielseitig einsetzbaren Designs sowie die Konformität mit dem MiroSurge Setup stellen verschiedene Anforderungen an das Instrumentendesign:
Klare Trennung zwischen der robotischen Plattform und dem Instrument: Der MIRO Roboter stellt für alle Arten von Instrumenten dasselbe mechanische Interface bereit. Weiterhin müssen während eines chirurgischen Eingriffs schnelle Instrumentenwechsel möglich sein. Dies erfordert, dass die MICA Antriebseinheit alle benötigten Motoren, Leistungselektroniken, Kommunikationselektroniken, die Motorregelung sowie die Elektroniken zur Verarbeitung der Sensorsignale enthält.
Leichtbau: Gewichtseinsparungen am Instrument wirken sich positiv auf die dynamischen Leistungsdaten des Roboterarms aus und erlauben das Ausüben höherer Manipulationskräfte.
Geringe Größe der Antriebseinheit, insbesondere ein geringer Durchmesser: Mehrere Roboterarme werden dicht nebeneinander am OP-Tisch arbeiten. Eine gegenseitige Behinderung oder Kollision der Instrumente muss dabei vermieden werden.
Gesamtansicht DLR MICA
Gesamtansicht einer DLR MICA mit aufgabenspezifischem Werkzeug (links) und universell einsetzbarer Antriebseinheit (rechts).
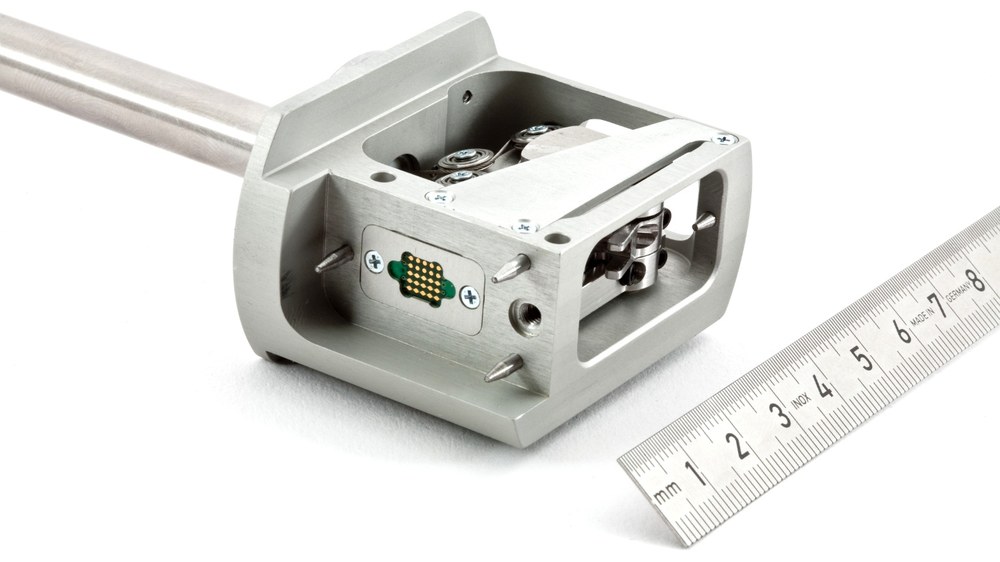
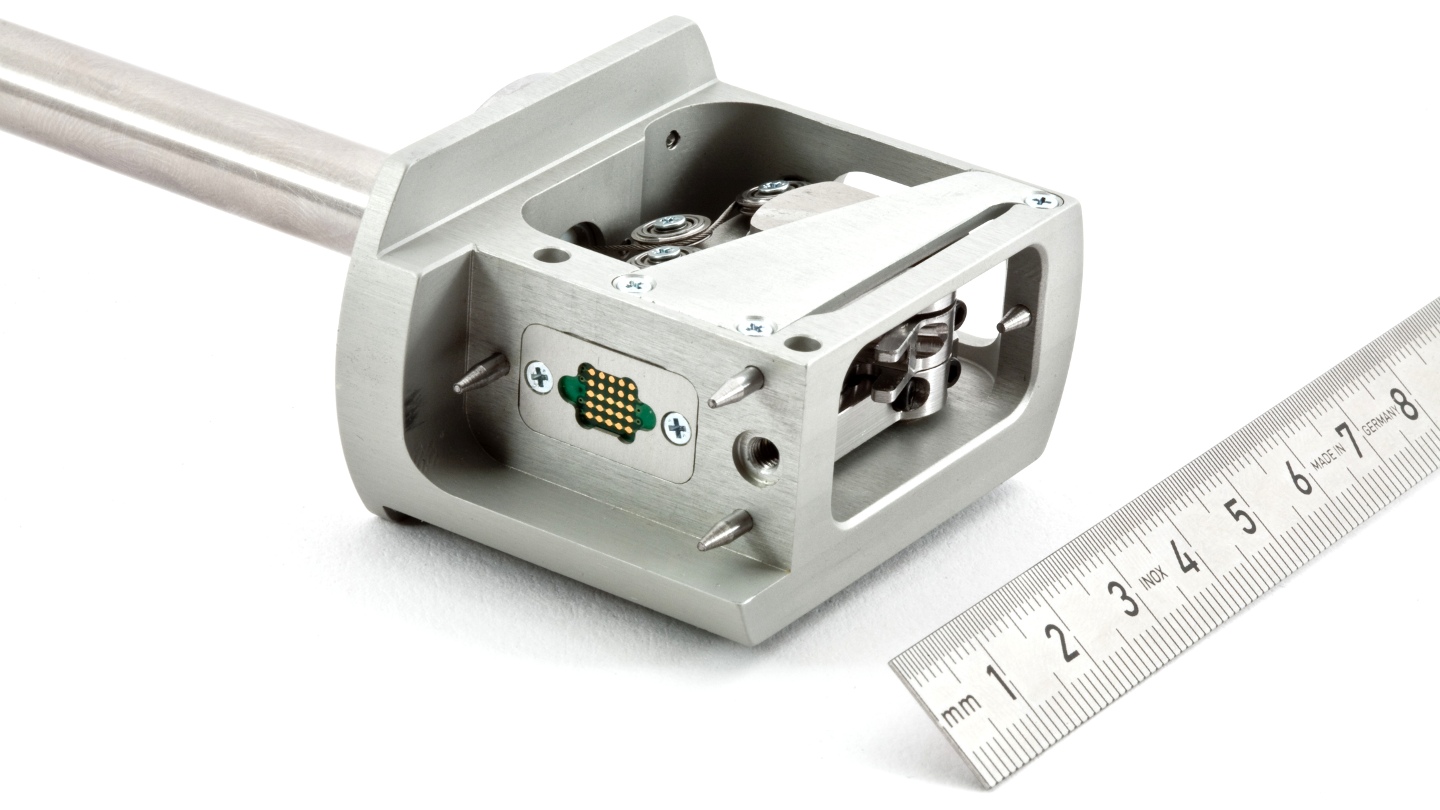
Umlenkeinheit des Werkzeuges mit Maßstab: Hier wird die Translationsbewegung der drei Freiheitsgrade der Antriebseinheit in Drahtseilbewegungen umgesetzt, um die Handgelenksfreiheitsgrade und den Endeffektorfreiheitsgrad des Werkzeugs zu bewegen.
Thielmann et al., "MICA - A new generation of versatile instruments in robotic surgery" in Proc. of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, October 2010, pp. 871-878.
Seibold et al., "Endoscopic 3 DoF-Instrument with 7 DoF Force/Torque Feedback", workshop contribution presented at ICRA 2009, Kobe, Japan, May 2009.
Seibold et al., "Prototypic force feedback instrument for minimally invasive robotic surgery", in Medical Robotics, Vienna, Austria, I-Tech Education and Publishing, pp. 377–400, 2008.
Kübler et al., "Prototypic setup of a surgical forced feedback instrument for minimally invasive robotic surgery", in Extended abstract and lecture, CURAC 2006, Hannover, Germany, October 2006.
Kübler et al., "Development of actuated and sensor integrated forceps for minimally invasive robotic surgery", The International Journal of Medical Robotics and Computer Assisted Surgery, vol. 1, no. 3, pp. 96–107, April 2005.




{kind=link}
{kind=link}
{kind=link}