
Designverfahren LBR III
Concurrent Engineering
Da der LBR III ein hochintegriertes mechatronisches System ist, war von Beginn an eine enge Zusammenarbeit zwischen Elektronik- und Mechanikkonstruktion unabdingbar.


Zum Projektstart wurde das grundlegende Konzept der Integration von Controllern und Leistungswandlern in die Gelenke festgelegt, ebenso die Kommunikations- und Versorgungskonzepte und die Stromverteilung. Innerhalb des Entwurfsprozesses der Gelenke und Verbindungen war eine permanente Interaktion zwischen Mechanik und Elektronik notwendig, um einen hohen Integrationsgrad zu erreichen. Diese enge Interaktion in verschiedenen Iterationsschleifen erfordert entsprechende Schnittstellen zwischen den verschiedenen Designapplikationen wie CAD- und PCB Layout-Software.
Finite Elemente Analyse
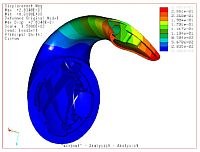
Der Entwurf eines Leichtbauroboters erfordert exaktes Wissen über die Steifigkeit der verwendeten Struktur. Da sich eine Leichtbaukonstruktion stets elastisch verhält, darf die Strukturdicke nur so weit reduziert werden, dass die Steifigkeit noch für eine gute Regelbarkeit ausreicht. Mittels Finite Element Analyse wurden alles kritischen Strukturkomponenten untersucht und das Design der Drehmomentensensoren für maximale Linearität und minimalen Querkrafteinfluss optimiert.