SRT3D: Ein Sparse Region-Based 3D Object Tracking Ansatz für die reale Welt
SRT3D: Ein Sparse Region-Based 3D Object Tracking Ansatz für die reale Welt
Manuel Stoiber, Martin Pfanne, Klaus H. Strobl, Rudolph Triebel, und Alin Albu-Schäffer International Journal of Computer Vision (IJCV) 2022: paper, code
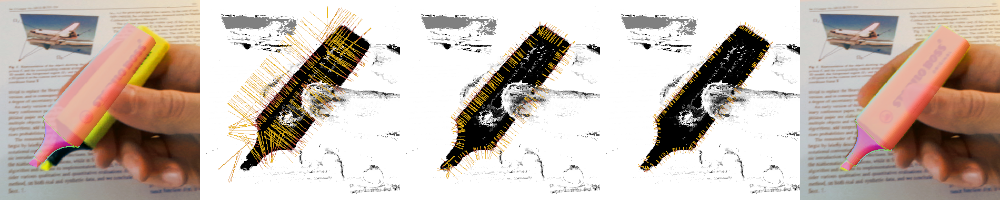
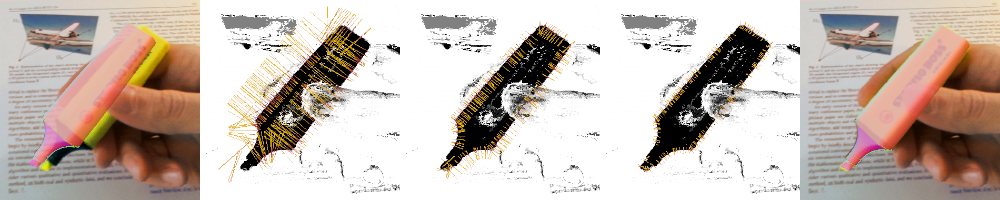
Regionsbasierte Methoden erfreuen sich zunehmender Beliebtheit bei der modellbasierten, monokularen 3D-Verfolgung von texturlosen Objekten in unübersichtlichen Szenen. Die meisten dieser Methoden sind jedoch sehr rechenintensiv und benötigen erhebliche Ressourcen, um in Echtzeit zu laufen, auch wenn sie erstklassige Ergebnisse liefern. Im Folgenden bauen wir auf unserer früheren Arbeit auf und entwickeln SRT3D, einen auf dünn besiedelten Regionen basierenden Ansatz zur 3D-Objektverfolgung, der diese Effizienzlücke schließt. Unsere Methode berücksichtigt Bildinformationen spärlich entlang so genannter Korrespondenzlinien, die die Wahrscheinlichkeit der Konturposition des Objekts modellieren. Wir verbessern damit den aktuellen Stand der Technik und führen geglättete Schrittfunktionen ein, die eine definierte globale und lokale Unsicherheit berücksichtigen. Für die resultierende probabilistische Formulierung wird eine gründliche Analyse geliefert. Schließlich verwenden wir ein vorgerendertes, spärliches Blickpunktmodell, um eine gemeinsame Posteriorwahrscheinlichkeit für die Objektposition zu erstellen. Die Funktion wird durch Newton-Optimierung zweiter Ordnung mit Tikhonov-Regularisierung maximiert. Während der Posenschätzung unterscheiden wir zwischen globaler und lokaler Optimierung und verwenden eine neuartige Annäherung für die Ableitung erster Ordnung, die in der Newton-Methode verwendet wird. In mehreren Experimenten zeigen wir, dass der resultierende Algorithmus den aktuellen Stand der Technik sowohl in Bezug auf die Laufzeit als auch auf die Qualität verbessert und besonders gut bei verrauschten und unübersichtlichen Bildern, wie sie in der realen Welt vorkommen, funktioniert.
Weitere Details finden Sie im Paper und in unserem Quellcode: https://github.com/DLR-RM/RBGT
Ein Sparse-Gaussian-Ansatz zur regionsbasierten 6DoF-Objektverfolgung – Experimente in der realen Welt
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Ein Sparse-Gaussian-Ansatz zur regionsbasierten 6DoF-Objektverfolgung – Experimente in der realen Welt
Weitere Details finden Sie im Paper und in unserem Quellcode: https://github.com/DLR-RM/RBGT


{kind=link}
